Right on, looks good. I would disable the Static notch.
Yeah I will :-). Just for information here is why I adopted it :
In FFT UI I saw this (first graph of FFT UI):
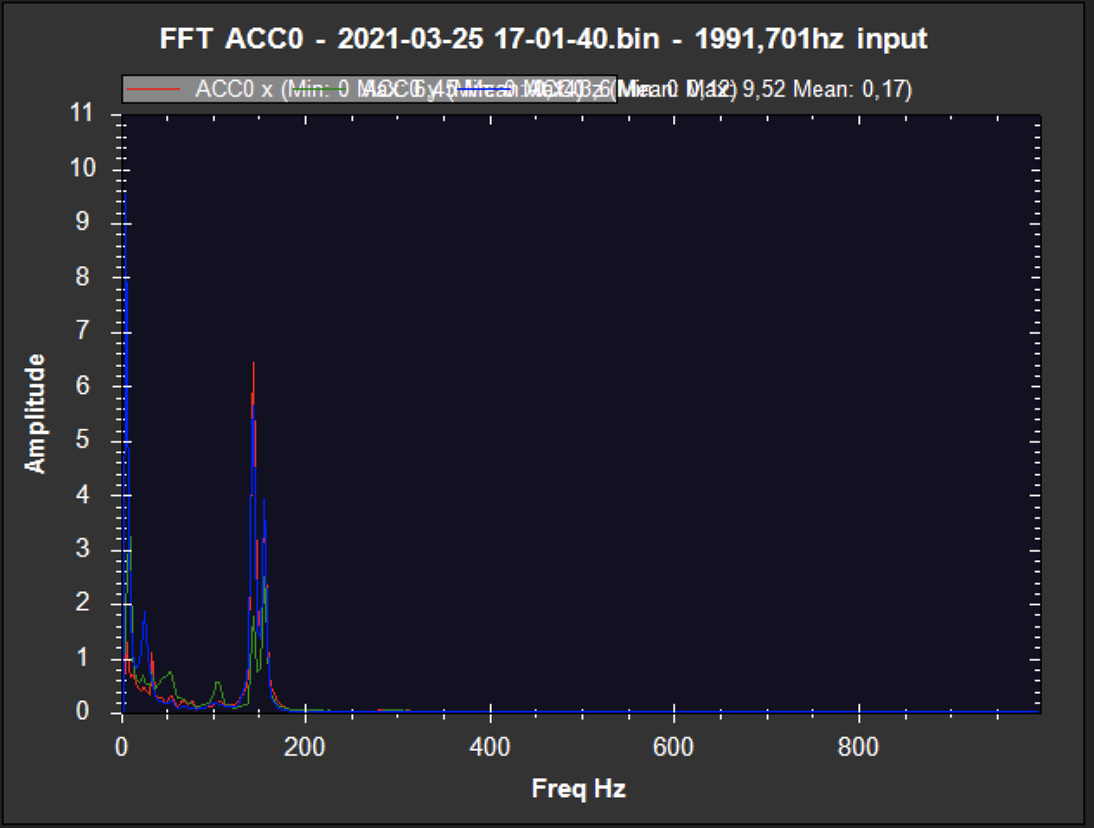
So I tried those parameters:
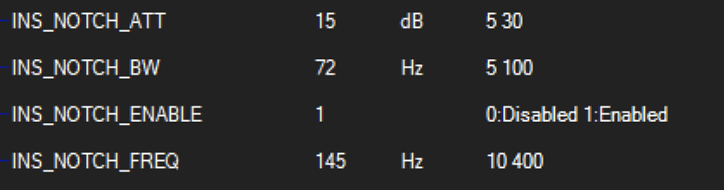
And as a result I saw this:
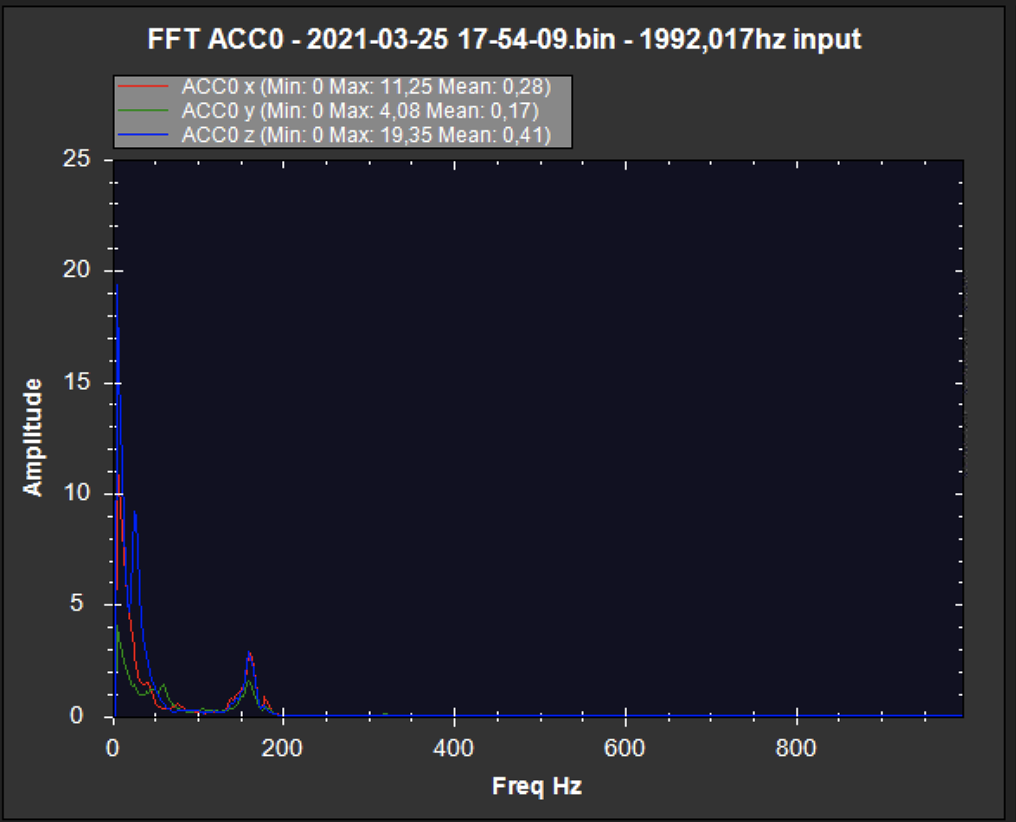
making me think that it should be better with it enabled
Nope, won’t do anything for accelerometers. All you did was overlap 2 notch filters on the gyro’s. Not good.
![]() I will kill it
I will kill it ![]()
1 Like
Well, as is is not windy today I did the autotune…but the tri is now unflyable  This balancing yaw movement has drastically increased to the limit where it becomes hard to maintain the tri in flight (and not
This balancing yaw movement has drastically increased to the limit where it becomes hard to maintain the tri in flight (and not  ). It seems to prove that the problem could be solved by tuning the right way…
). It seems to prove that the problem could be solved by tuning the right way…
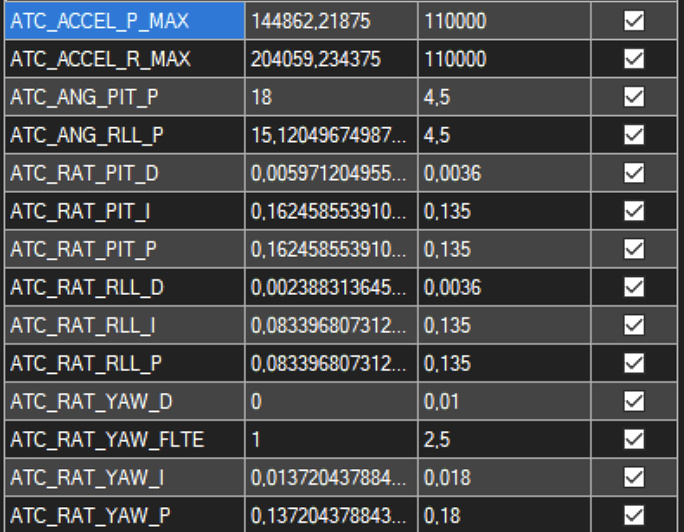
Here are pre and post tuning values (first column are new values after autotune)
Maybe that I should do another autotune session ?
How did it fly before doing the Autotune? Back to basics here, what prop size and battery power? Post your parameter file. I wouldn’t do another Auto Tune with those ATC_ACCEL_P/R_MAX values that high.
It was flyable but as said, I had this yaw balancing movement that was very annoying. To illustrate it and be sur it was not a physical problem from the frame I filmed the tail during a short flight (sorry for the bad quality):
https://www.amazon.fr/clouddrive/share/Vh3Kk7u21U7uV4dHnvmbPEkS0CxcfWo2RGJ4GEmYC15
Props 7inch
Motors 2807 1300KV
Battery 4S LIPO
Post a link to the .bin file flight log.
2 Likes
Years ago we had problems with tricopter tail wag, and this below is taken from one thread on diydrones.com.
To solve tail wag:
Yaw stabilize: 1.2
Yaw p rate: 0.280
Yaw i rate: 0.038
Yaw d rate: 0.010
Things have changed now but that might point you in the right direction.
1 Like
Looks like one of or a combination of a few things (in order of most to least likely):
-
Slop in your tail mechanism
-
Yaw acceleration rate is too high
-
rate P term is too high
-
rate D term is too low
1 Like
Thank you all for your advice. Thanks to you, I reduced the problem and it is now “manageable”. It is still noticeable on camera so I will continue to try eliminating it totally but at least it is no more visible on stabilized recordings like GoPro one. Edge effect is that now my YAW I term is at the bare minimum (0,010) and D is at its max (0,020). It is never good to be on extremities whatever the subject is…
I did not touch IMAX because I do not really understand it’s impact. If someone can explain it and if it could help on my case it would be welcome 
Just wondering if the OP found a solution to the “rolling ass” (love the description).
I did a first flight today with a tricopter. Got LOTS of rolling ass - which for me was the tail yawing back and forth probably +/- 30 degrees (60 total). Did some reading and decreased Stabilize Yaw P all the way down to.75 (down from stock 4.5) over 3-4 flights. Each reduction of a point or so resulted in an improvement to where I was at +/- 10 degrees (total) and a much slower rolling ass.
But…
On the last flight (in POS HOLD for all these flights), the tricopter started to oscillate VERTICALLY - shooting up a few dozen feet and then cutting power to zero and falling a few dozen feet before catching itself and repeating.
I was able to land with minor damage. No idea if the reduction in Stab Yaw P had anything to do with the vertical oscillation. To me that doesn’t make sense but it was the only param change I made.
So…
Luv to find a way to stop my rolling ass ![]() as well as stop the violent vertical oscillations.
as well as stop the violent vertical oscillations.
Thanks.