I´m building a Y600 tricopter using pixhawk 2.4.8
the first issue is that following this: http://ardupilot.org/copter/docs/tricopter.html
If I connect the YAW servo to port #7 of pixhawk nothing works, the only way to have YAW servo responding to the sticker was by wiring it to Taranis receiver port #4.
What is currently happening is that the quad tries to spin, if I correct it on the YAW sticker it gets stable for sometime (few seconds then it again tries to spin, Motor rotation is correct otherwise I would not be able to fly at all.
Flightmode is Stabilize, but Acro does the same (both without GPS for now)
Why can´t I use port 7 from the pixhawk as described on the documentation ?
can this issue of not using port 7 from the FC causing this problem ?
check that servo7_function parameter is set to 39, and also make sure that the servo rail has power to it. You will need a 5V bec. DO NOT POWER THE SERVO FROM THE RECEIVER as this will pull too much current from the autopilot.
I confirmed this si configured to 39 correctly. I have the power module giving power to the pixhawk, is this enough ? Please consider my ESCs are providing the power supply with the BEC.
I have motors on 1,2 and 4, and if I put the servo on 7 nothing happens.
The power module doesn’t feed the servo rail: servo rail needs to be supplied separately.
If your esc’s have a bec in them (some do, most don’t anymore) then that might suffice but you’ll need to check whether it is sufficient. Often bec on esc’s have a 1A limit, which is probably not enough. I always power the servo rail separately and strongly recommend it. Have a read here: http://ardupilot.org/copter/docs/common-powering-the-pixhawk.html it may help explain.
I’ll try to set up a test over the next few days (my tri doesn’t currently have an autopilot in it), but in the mean time can @Fernando_Labombarda and @damianden please confirm that you haven’t uploaded an old param file from before AC3.5, and also can you please post a log file?
Thanks.
sorry for the delay, I only had the chance to look into this now.
servo7_function is 39 as expected.
I don´t think I have uploaded any old param file James.
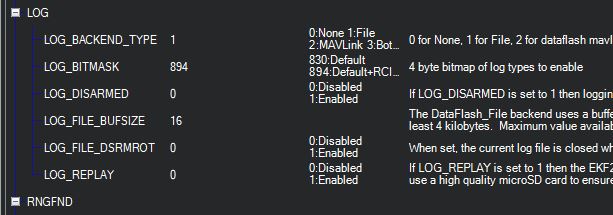
This is weird, My board hasn´t generated any log. the APM folder on the card is empty, I checked the settings and the LOG BITMASK is properly configured.
Just to check: the copter is arming correctly, right?
Anyway, could be an SD card issue, but try with log disarmed to 1 (starts logging when powered on), and see if that gives a different result. Also, if you could save your parameters to a file and upload those it will give me something to look at.