I grabbed a Omni chassis with the goal of having an Omni3 (FRAME_TYPE = 1) ardurover running brushless motors with the wheels directly connected to the motors. After going through mad amounts of motors trying to find the right one that (a) fits on the motor mounts and (b) has the right size shaft diameters for the wheel couplings, I finally landed on:
So far so good, or so I thought. After arming and spinning up the wheels, they do a bit of stuttering without really moving. When I lifted up the Omni rover removing the load, hell broke loose. The wheels spun fast, really fast. So fast that one of the wheels flew apart shattering my monitor. How can I get a smooth start from these things? I don’t want to add a gearbox to each motor, seems a bit of an overkill. Video of armed and stuttering and the carnage
4700kV motors direct drive on a Rover? Do you realize that’s 4700k RPM/Volt? That’s about 30X what you could use for a brushless motor with direct drive. You need a gearbox with a steep ratio.
Yep you probably need to start with electric scooter wheels or similar, atleast they will have the appropriate number of poles for the application. Do what the rest of us do. Spend hundreds of hours reading, watching videos if you can find some, and just learning everything you can about it BEFORE you pull the trigger on 50000rpm 4700kv motors! Inrunners are all pretty much low pole high speed motors. It was the invention of outrunners that allowed direct drive in the first place. Read up… for years… Try to find out what all the specs mean and pin down how it will all work as much as possible first. It can be frustrating when you just want to get into it and build, but the more you know in advance the better chance you will have of success
I noticed the gearmotors that come with that kit are 150RPM max. I would guess you don’t want to spin Mecanum wheels very fast. Let’s say 300RPM max. That’s a tall gear to get a 4700kV motor down to that. Do-able though but it will be a pain packaging it in that frame. Buy the cheap brushed gearmotors…
Yes brushed is a good idea for low speed. The way direct drive brushless wheels work is through the use of sensored motors. Not sensorless bldc which are the norm for rc. Go to elec skateboard wheels or something, or have the gear reduction.
Yes, exactly. My 1st Rover was based on a 2wd Basher truck that had a Brushless motor. It was terrible even after I geared it down further. Cogging at low speed and too fast at high speed. A sensored setup would have worked better but I sold it instead and built from a Crawler chassis. It’s a great vehicle.
I built my first crawler (rc not rover) with a sensored brushless setup, but i ended up going back to brushed for the way you can be at zero speed and just gradually increase torque until the wheels start to drive when loaded. I found even the sensored bldc had a minimum rotation speed which was too fast for technical crawling.
Yes, that’s right. There sometimes is Wiki content across vehicle types for common things. On that page are example screen shots from Plane and Copter. Brushed motors are much more common on Rovers. You want brushed gearmotors. @count74 built a cool Mecanum wheeled Rover perhaps he can offer some guidance.
It seems everything is centred aroud fpv quads when you try to buy hardware, and the yt community is full of ppl who fight over the absolute lowest latency dshot1200 48khz nonsense so it can keep up with thier lightning reflexes for drone racing, its annoying when you’re trying to apply the gear to our applications. For your rover Brushless will work, but not direct drive, it will have to be geared. Otherwise will need to be sensored or brushed.
Hi, it is nice of @dkemxr to call my mecanum rover “cool”. It is just two axles from a mecanum wheeled rc toy which is sold under many different names. It is all plastic and not very sturdy. It needs to be repaired or rebuild and the motors/gearboxes I would use for that are these, but the long axle type:
The gearboxes come with brushed motors, but can be modified for small brushless inrunners. You can also move one gear to select two different gear ratios.
That won’t work, both motors and ESCs. You need buy brushed motors 60 to 130rpm with encoders and controlled with Arduino controller alike.
If you want brushless, which have not many sense you need go with RC car brusless with 3 VESC type controller.
By size and wheel type no more options. I would send back the esc and motor’s.
Just wrong choice
Actually going to hang this one up, had my tim the toolman moment. I did see you built a nice rover using the redcat crawler. I have a tank rover already and was looking into adding a crawler, would pair well with the kids axial.
Would you still recommend the redcat chassis/off the shelf for a 1/10 scale crawler? I also noticed a gen7 everest pro and sport, any noticable differences?
I think I have a handle on adding the components, it’s actually fitting everything in comfortably and securely - any tips/mountings etc I can order?
The Redcat Everest makes a great Rover. The Pro is the same base chassis with some body accessories. The inner fenders would be nice to keep stuff out but not required.
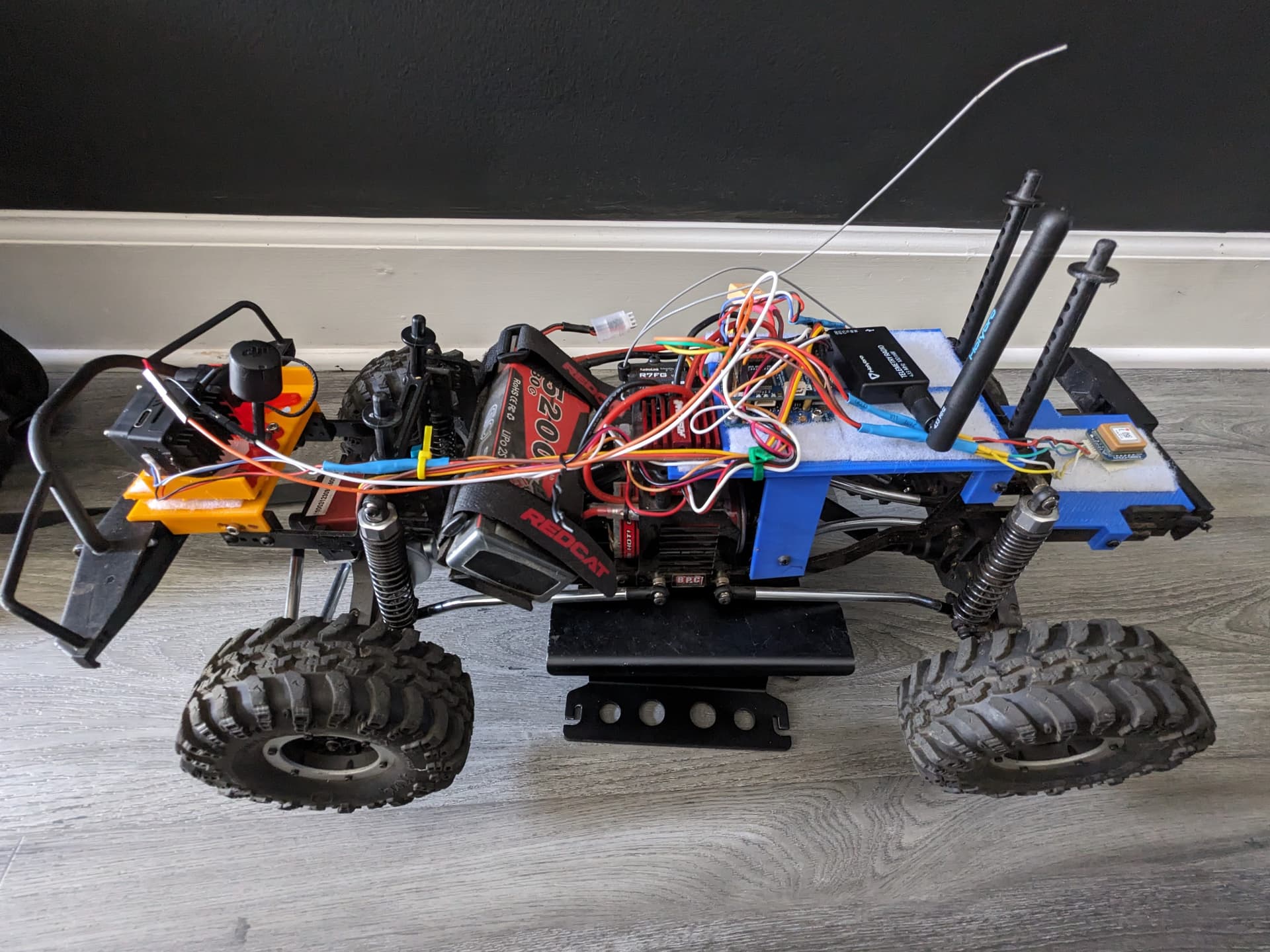
You will want to add some mounting plates for the additional hardware but it’s very easy to do. I used a combination of plastic and aluminum which you can see in the photos. The center one mounts the FC and Rx, GPS and telemetry in the rear and a Vtx in the front. It’s a 2W Vtx so needed an aluminum plate for a heat sink.
Fun project and not that expensive to complete.
Order some extra spur gears right away. They are plastic and strip. They are very cheap insurance for the rest of the driveline.
DJI O3 Air Unit (adding fan & heatsink continues overheating ~10 minutes on idle)
Overall quite happy with the rig, other than the crawler needing a full time mechanic. I’ve had to order and replace half the drive train, shocks, bumpers with stronger material. It also took a bit of time to make custom 3d printed platforms to hold the hardware, will definitely clean up and share if it helps anyone.
Also feel free to ask any configuration/parameters etc, there were a few hiccups and troubleshooting lessons learned.
Looking good! I just replaced the FC with a Cube Orange+ in mine. The old PixRacer wouldn’t run the Quicktune Lua script in developement now. Drives like it’s on rails!
Surprised you had to replace components. I have only gone thru a few spur gears.
I had a 2W VTX on mine for awhile. I mounted it to an aluminum plate as a heat sink and no more overheating.