Hi, does anybody know if it is possible to have 2 props in opposite way on tail of a tricopter instead of only one driven by servo. I did not find a frame class in ArduCopter covering this kind of “architecture”. Y6 frame class has it for the tail but it requires the same opposite props pattern on the front. I just would like to mix Tri & Y6 classes  is it possible ? My goal is to check which approach is best for Yaw management in tricopter.
is it possible ? My goal is to check which approach is best for Yaw management in tricopter.
Thanks
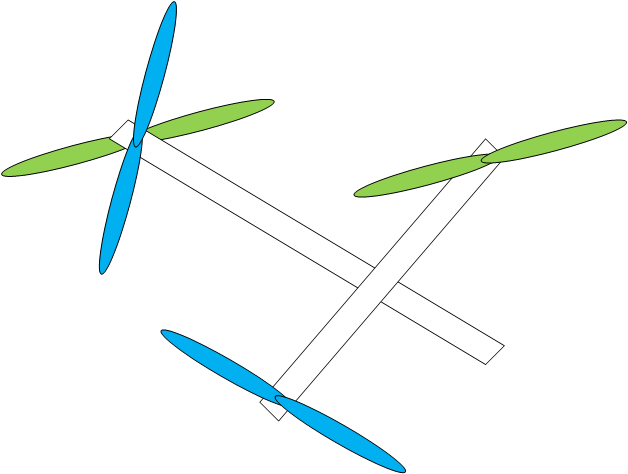
Well I mean something like this:
Any Idea ? Maybe could I use the Y6 with motor parameters tuning ?


It was in MultiWii 