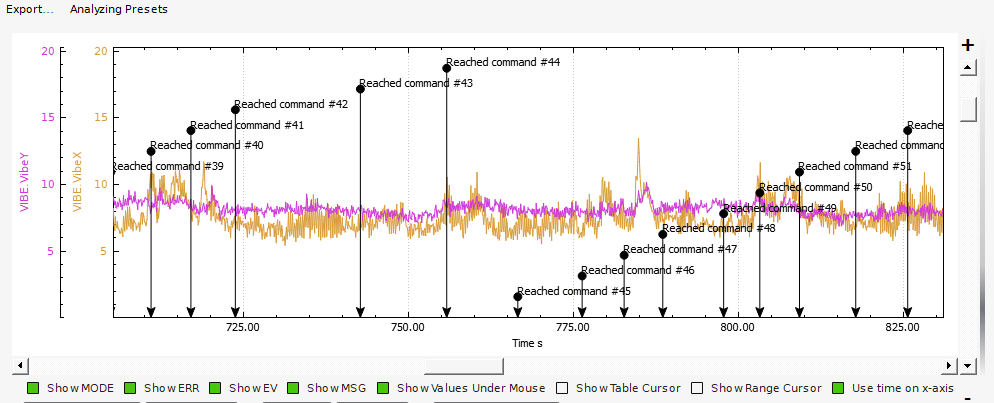
It’s registering a little higher vibration now with the mount tied down. But nothing drastic and no clipping at all. Definite improvement in the position controller. Looks like it tracked the GPS course pretty much dead on this time.
Are you gonna plug in that radio and try it again?
It was actually at ~10kts, not 20. But it looks like the turn from 2 to 3 is pretty sharp. And it must be only about 200 feet from 3 to 4. Due to the way the nav controller works it might not get going much faster than that so it can make the corners within the accel limits. You’d have to give it bit more room like maybe 400-500 feet to see if it gets to 20kts in auto. But as weak as the battery is in that helicopter that might not be a good idea because it doesn’t look like it’s going to go very far until you put bigger fuel tanks on it.
Yeah, servo1 is still bouncing around but bounces opposite servo 2 when everything is fairly static as far as attitude
And now, can actually see what the frame is doing. You have slightly higher vibes in Y-axis than X
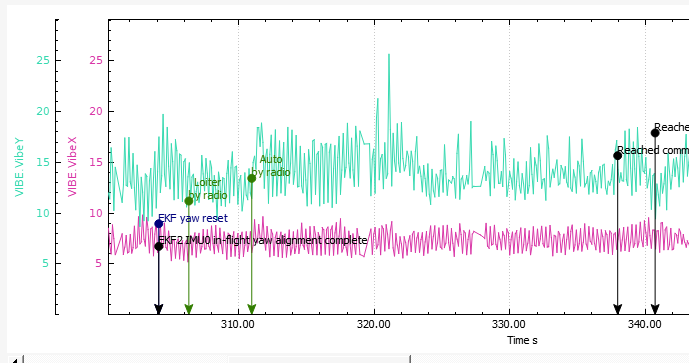
But the y-axis is a bit excessive and that is the axis that rotor balance and tracking issues show up on. Checking the blade pitch static on the bench for tracking is a good setup practice. But they rarely fly that way when they’re producing lift. Seeing that knife edge on the rotor disc in static hover is good but doesn’t always yield the best vibration characteristics. This is where the DynaVibe comes in handy. We’ll some track the rotor on Jet Rangers so one blade is sometimes flying higher than the other to get lowest vibration in static hover. Then take it out and cruise it at 100kts and see what we get. Sometimes have to adjust the pitch links for cruise to lower the vibration in cruise flight after adjusting it in static hover. But the DynaVibe has a strobe and the blades are numbered so we know exactly which blade is causing the problem.
Your RC heli is no different. And the controller has a sort of DynaVibe built into it with the IMU vibration measurement. You were hiding this from yourself with that jello plate. Now you can see it. So what I do when I can’t wangle the DynaVibe is mark one blade holder with a marker so you always adjust the same one. Hover it and look in your ground station at the vibe messages. Land it and turn the pitch link on that marked blade one way or the other. Re-hover it and observe the disc tracking visually, as well as what it says on the GCS. If it gets worse, turn the pitch link the other way and try it again. Before I found out we could use the DynaVibe on RC heli’s I have spent 6 hours before tuning and tracking the rotor on my RC heli’s to get both x and y below 8-10.
Another source is the transmission gears. Check the backlash all the way around on the main gear and see how much radial and axial runout it has. Align is horrible for this because of the way that gear mounts on their very poor autorotation clutch. So sometimes it’s just about impossible to get rid of that geartrain vibration in an Align without replacing all the parts from a higher-quality helicopter that has a brass bushed over-running clutch.
Sure, you can try to filter it all out and adjust the tuning to match. But fixing it mechanically yields the best results. Keep in mind these things are mass-produced for 3D pilots who crash 'em and rebuild 'em several times a season. So the quality is “good enough”.
As far as the servos, the controller only sends a signal to it. The servo has an internal pot or hall effect that tells the servo’s controller what the position of the output shaft is. So that dancing on servo1 is not from the servo, it’s because the frame is shaking side to side.
Doesn’t that helicopter have a FBL unit tray in the front? Why didn’t you put the controller on that? IMO that would be a better location for it.
Edit: This is the plot of the x and y vibes with that jello plate in there. It doesn’t tell you anything about what the frame is doing. It would be like let’s mount the DynaVibe transducers on the Jet Ranger with some rubber pads and see if we can still balance the rotor. Fly it, cyclic shakes, all the needles in the panel shake, your passengers in the back got their coffee vibrated right out on their lap, but the DynaVibe says it’s all good.
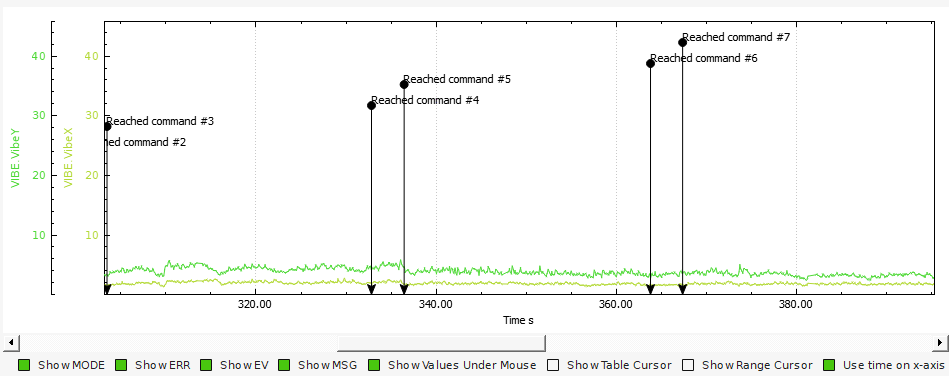
This is what you want to get your vibration plot to look like. This is from one of my piston machines flying a survey flight. This machine has a perfectly balanced and tracked rotor using the DynaVibe to tune it. Notice the amplitude of the vibration peaks on y-axis. The higher amplitude on x is due to the engine and the vibration from the acceleration of the piston and crankcase and what gets transferred to the frame. When the mix in the cylinder lights and the piston goes down, the crankcase goes the other way. It is balanced with reciprocating weight in the piston and rod, as well as the counterweights on the crank. But it still vibrates.
Your electric in its current configuration is not as smooth as my piston gasser.