Does it recommend the pitch up and down on different blades or just the reflecting blade? Also does it recommend which way to run the links. Or just learn by experience?
Update. Got v3x moved to top of tail mount. Attached to the frame. New main shaft installed. Running wires. Making new battery mounts. Found pwlink.
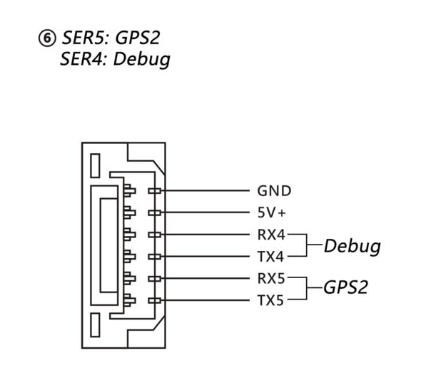
I still need to find a pin out diagram for the serial 4/5 port. Their is 4 wires in the plug not sure which ones are Rx and tx. I have had problems before with radios. If the Rx/tx were turned around it would still talk just slow. Wondering if that didn’t happen again.
This is the pinout, and that plug has six pins in it. When you hook it up the Rx in the port goes to Tx on the device, and vice-versa.
I was on craft and theory site trying to see what their wire config. Was to make sure Rx and tx correct. Ran across this form. Very similar. Mine says sensor lost also. Says could be caused by my 8xr antenna to close to each other. And says logging and a slow SD card could cause slow telem or locked up telem on nuttx. Might be it ???
The antennas should be oriented at 90 degrees to one another. Like one vertically polarized, the other horizontal.
We do not use SD logging with our commercial helicopters. It is disabled. I only enable it if I am testing something, and then I only enable whatever feature it is I need to log for the test.
I think my logging is on for these tests correct? I tried 3 SD cards including the one sent with the v3x. I finally found one that would even work. Don’t know the specs on it right now. My antenna are hanging together out the bottom of the heli. Didn’t seem to affect the radio. But might be slowing telem. Will get that changed.
So what param do I need to turn off in the logging. That could be using to much CPU. Or I could try the other SD cards to see if they will work with all the changes that have been made. I am not putting it past me that I had no clue when doing SD card trials early this year. At the beginning of this thread we made param adjustments to get logs so we could read them.
No, it will not use too much CPU. It will fill up the SD card with the machine flown 6-8 hours per day in-season and the USB port and SD card cannot be accessed in our machines without removing the controller. Since we have no use for dataflash logs and it would be a hassle to even retrieve them from the SD card we disable it.
Ok well darn. Was hoping I found the slow telem problem. I knew the files I am posting are only 25 meg. So didnt think that would cause a problem. Computers handle that in seconds. Or milliseconds. I will email craft and theory for a wire diagram of their Rx tx wires.
I would try moving the telemetry to serial port 4. When I first started with the V3-series controllers I tried getting the passthru telemetry to work on the DataBus port where UART2 (Telem2) is. I could not get it to communicate even though I had all the settings correct. The documentation for the CUAV V3 says to use Serial 4 for the passthru telemetry. I moved it to Serial 4 and it worked. That’s what we’ve used ever since.
Another thing, I do not use the Craft & Theory converter. The ones we got have blue heatshrink on the converter unit, can’t remember where I got them. Amazon I think. Google ‘yappu telemety cable’ and see what shows up.
I only ever used one C&T converter, ordered it for CUAV V3 pinout, it came wired wrong and had to fix it - Rx and Tx were turned around. The blue ones we got come wired for Pixhawk with the power and ground on opposite ends of the plug, have to pull the pins and put them in the right slots. But it comes with the right plug on it to plug into the Serial 4/5 port on the V3x.
I’d also have to see what version of OpenTx you’re using, if you have it configured properly in the radio and the radio isn’t running out of memory. You could zip up your SD card contents, along with the settings file for the radio, and drop it on your Google Drive or something so I could create a profile in OpenTx Companion and load it to see if you have setup problems in the radio, or the radio is running out of memory.
You have the PCB antennas? I think you do.
Those PCB antennas have to be either oriented vertical/horizontal or spaced properly to act as a phased pair. The idea behind orienting them vertical/horizontal is to eliminate nulls off the ends of the antennas, and problems with directional radiation pattern due to phasing. For instance, I have a phased triple array of 33 ft tall 40m verticals on my ham station. They are spaced at 1/4 wave apart with phasing delay lines on the feeders. The antennas “fire” at 1/4 wave intervals and 1/4 distance in air is longer than the 1/4 wave distance in the feeders due to a phenomenon called “velocity factor” in the feeders. With that array on end-fire I can contact a station in Russia at will on only 1kW of power input to the array. The gain of that array in the forward lobe of the radiation pattern is HUGE. The F/B rejection is also huge. While I can talk with the station in Russia off the forward lobe, I cannot pick up a station only 5 miles away off the back side of it. It is several times more effective than a yagi, but very complicated to tune and make it work.
Any time you orient polarized antennas in the same plane you will get this directional phenomenon. While your RC antennas are not tuned to the precision of my phased ham antennas, it is still there. Orienting them in different planes provides 20dB of attenuation between the horizontally and vertically polarized elements and prevents nulls for true omni-directional reception, which is what you want with a RC aircraft (normally). It also helps prevents lost packets at your RC radio because the antenna on that may be vertically or horizontally polarized as you move the radio around. Or the aircraft may even be in a null off the end of the dipole antenna if the antenna on the RC is pointed directly at the model.
The RF from your transmitters looks like ripples in a pond if you throw a stone in the water. Those “waves” have an orientation and have to excite an alternating current in the antenna to get the signal. If the antenna is not oriented properly to be excited it will get a poor current, and on data transmissions result in lost packets. That’s why the radio on the aircraft has two antennas. If the aircraft banks in a turn and points the end of the antenna at your RC radio, it will lose the signal because it is in a null off the end of the antenna.
Ok so I had thought about making a upside down v with one flat side forward and one sideways few inches apart. Each 90 degrees tecnially one would be end pointing 3 o’clock and the other 7 o’clock. Or should I do one vertical and one horizontal with 90 degrees and one sideways and one flat forward. They are pcb on the end if small wires.
I have 223 on my radio. I went in last time to do yaapu install and it went from 222 to 223. Didn’t want yo fight the radio to put 222 back on it so went ahead with 223.
Craft cable plugged right in but unsure of wiring config unless I cut the heat shrink if they have the board labeled. I emailed them but no response yet. Seen amazon had some cables along with eBay. But went with wiki partner to solve any unknown issues. Guess I still stepped on the bear trap anyways.
That also works very well. And is probably even better than having one vertical, the other horizontal. Ever seen the old “rabbit ears” for TV’s? Pretty much the same principle.
2.23 should be fine. That’s what we’re running here. Build hash ae5ac05b, dated Jan 7, 2019.
Well, that C&T one should work. You can swap the wires around on the Rx/Tx to experiment to make sure you have them hooked up right. It won’t work at all with the wires reversed. So I think you got that right, just switch them over to the SERIAL4 and try that instead of SERIAL5. I’m pretty sure SERIAL4 is what everybody uses.
Info I guess for the community.
Here is email.
Hi alan,
Here’s the pinout of your Pixhack cable as delivered:
Pin 1 (red) connects to TX on your flight controller.
Pin 2 to RX
Pin 5 to VCC/+
Pin 6 to GND/-
Edit. Both your pin out and theirs matched what showed up so I moved them to the corresponding serial 4 pin out you provided. Just about got all the wires tidied up. Need to make 2 battery cables and adjust params for telem and try WiFi link. And ready to fly hopefully this weekend .
Is it better to series and parallel OR parallel then series. I think parallel then series for even battery drain. But if one battery becomes weak the whole system becomes weak. If you series and then parallel and one becomes weak then you only loose half the system. And currently I only have 1 battery 6s sensor feeding voltage to v3x. Not sure if it matters as long as I don’t run them to critical voltage.
No you don’t because parallel batteries will always cross-feed if one is weak and they will equal out.
It doesn’t make one bit of difference if all four batteries are the same size.
Ok ready to fly I think
After I do recalibration outside for gps signal. I hung the heli by the rotor to check cg. Adjusted battery location to have 1 degree pitch down forward. Not sure what that calculates out as split. As long as it is forward weight. Should be ok. Did blade less spool up. Main shaft looked better. Do not have a blade balancer. Or scale that small. I have a digital one but way to small for those big blades. I read align blades might need tape balanced. If so I should get something to check them.
hello again. here is log of flight.
changes
i put new main shaft in heli.
i relocated the v3x to above the tail mount. it is solid velcro and 1 zip tie. will send picture on a edit later.
Relocated the batteries. i have 2 inside factory battery bay. i have 2 with bottom of the batteries even with the bottom of the heli on either side. a total of 4 batteries.
i switched the wires on the serial 5 to serial 4.
i removed the mav link radio and installed the wifi pwlink
i made a custom mount like upside down rabbit ears tv with a ziptie with each pcd strip orenited 90 degees from each other.
i did move and bundle wires along the side of the heli. so i hope it dont cause rf but nothing high voltage is near any of the servo or sensor wires.
i removed the wire i thought that was running into the motor on the old 3gx system. it actually only made a loop around the base of the motor. have no clue what it was for but it is gone.
i have not fixed but i did notice my blade grips wrist connection on the tail were shaky. they dont seem to be loose when i tighten the bolt but i can shake them every direction blade tip is at least 1/4 to 3/8 travel.
the main shaft seamed to help spool up vibration on the tail. it still has small shake around 1000 ish rpm. but smooth below and above that guess of rpm. tail seamed to not shake as much as before on spool up.
wifi was connected the whole time until it was out of range and back in range. i could not find a tlog that it should have saved. ???
I flew the auto flight at at 500 ish feet long and opened corners to 50 ft with 3 waypoints. all spline.
batteries were fully charged but the ESC kept making noise. not sure of the deal with it. it was not the battery low noise. i did not adjust the return to launch limits so they went off as before. really short flight.
heli had to fly in 20 mph wind from west north west the heli was flying east and west. so not quite a tail wind. it never went fast even tho it was set to go 22mph. according to logs and watching it.
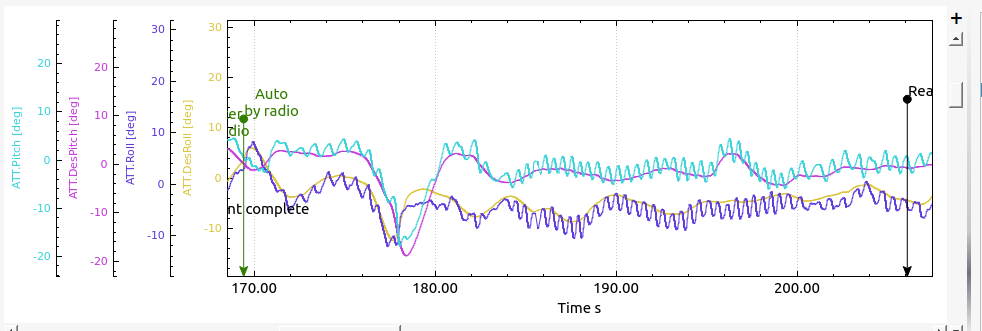
it was not drunk just stumbling. like it was constantly hitting the brakes and making small corrections. the corners looked better but slow big tail swinging turns with some over steer. i was guessing that was the wind. i did not see alot of tail going up and down like before. it looked fairly level.
the log on vibes looks bad to me. but not sure what to make of it in the new location.
the telemetry was working at take off. but when i landed and spooling down it said 5. should have been farther than that. i don’t recall if battery voltage was reading correctly. i do remember that it must have been back in wifi range when landing and battery fs was going off on the lap top behind me but not on the radio. so still have a prob.
That’s just typical Align mediocre quality. They are made cheap to crash and rebuild often for the typical 3D stick banger. They do make better “upgrade” parts for them if you want to spend the money.
The vibes don’t actually look too bad, the position controller looks pretty good, but the helicopter is unstable and it’s not handling decent at all. As soon as you engage auto it does like a hula dance.
Would you be interested in boxing up the helicopter and radio, send it up to me so I can take a look at it? Send me an email.
Sorry about the low quality photos. My camera is not the best on my phone. Wife’s I phone does better. If we need more details. 8xr still on left lower back side. V3x power module now on right back middle below it is the pwlink. All wires routed and secured.
Should I update the software to 6.9. Or what ever qgc is telling me it is not up to date? Mabey I had a bug in the system when I downloaded it ?
Update on Alan’s Trex 700.
I’m glad Alan sent it up to me to look it over. Trying to diagnose the problem via the forum would’ve been impossible. No amount of “tuning” would’ve fixed it because you can’t fix mechanical problems in software.
I thought it would be good to take a video of the problem on Alan’s Trex 700 so folks that are new to helicopters don’t make the same mistake.
First thing I did was make him a new controller mount tray with 6061 T6

Then I went thru and reviewed the settings. Decided too many things had been messed with, so I loaded my custom firmware in it and reset to defaults to start over.
I was concerned about a couple things I found upon initial inspection of the machine. But powering up the system and trying it confirmed my concerns as being valid. I didn’t even have to put the dial indicators on it - you can see the quite serious problem visually.
4 Likes