Hello,
I’m using Trex-150 combined with Pixracer R14 and a slightly modified version of Ardupilot 3.6.4.
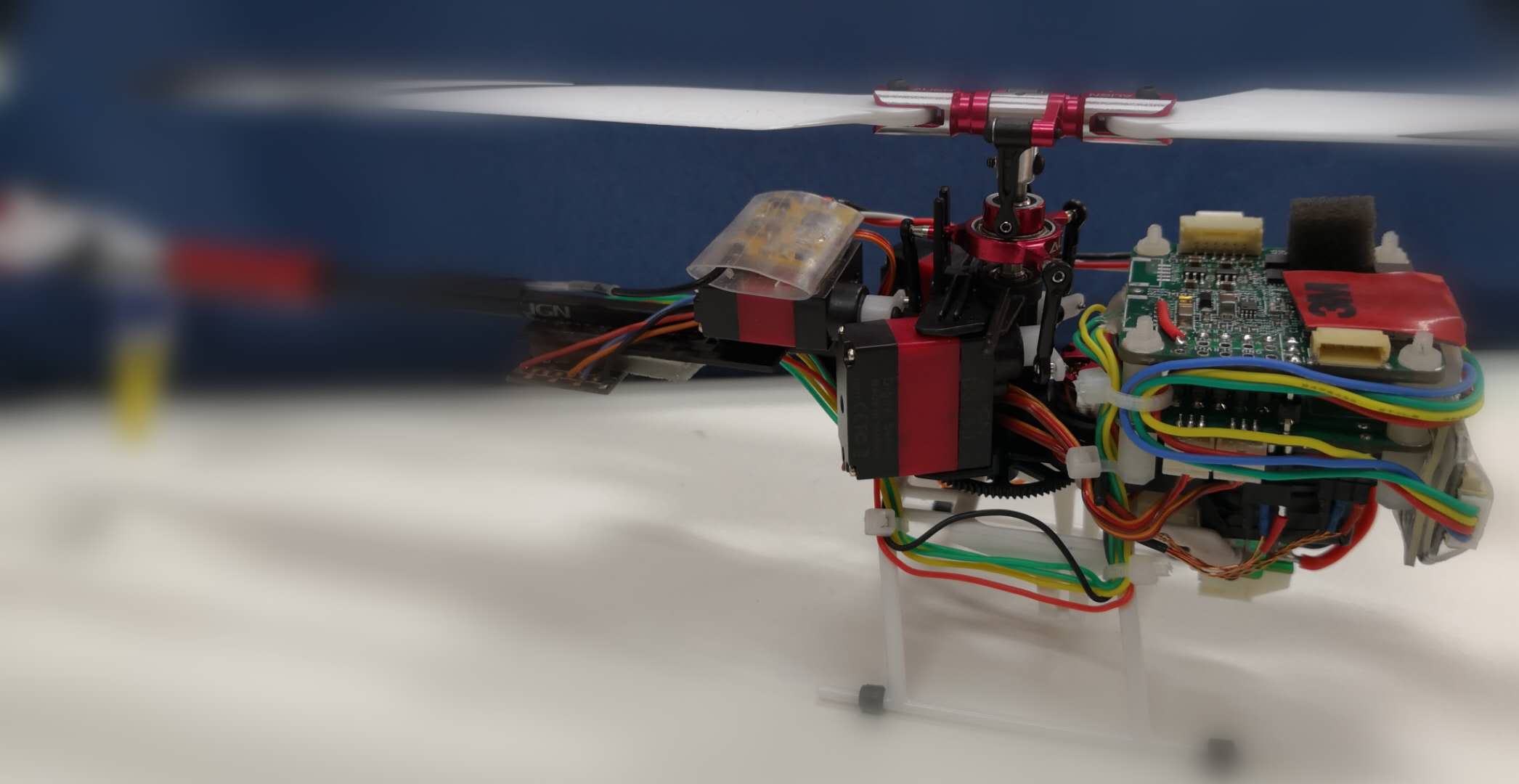
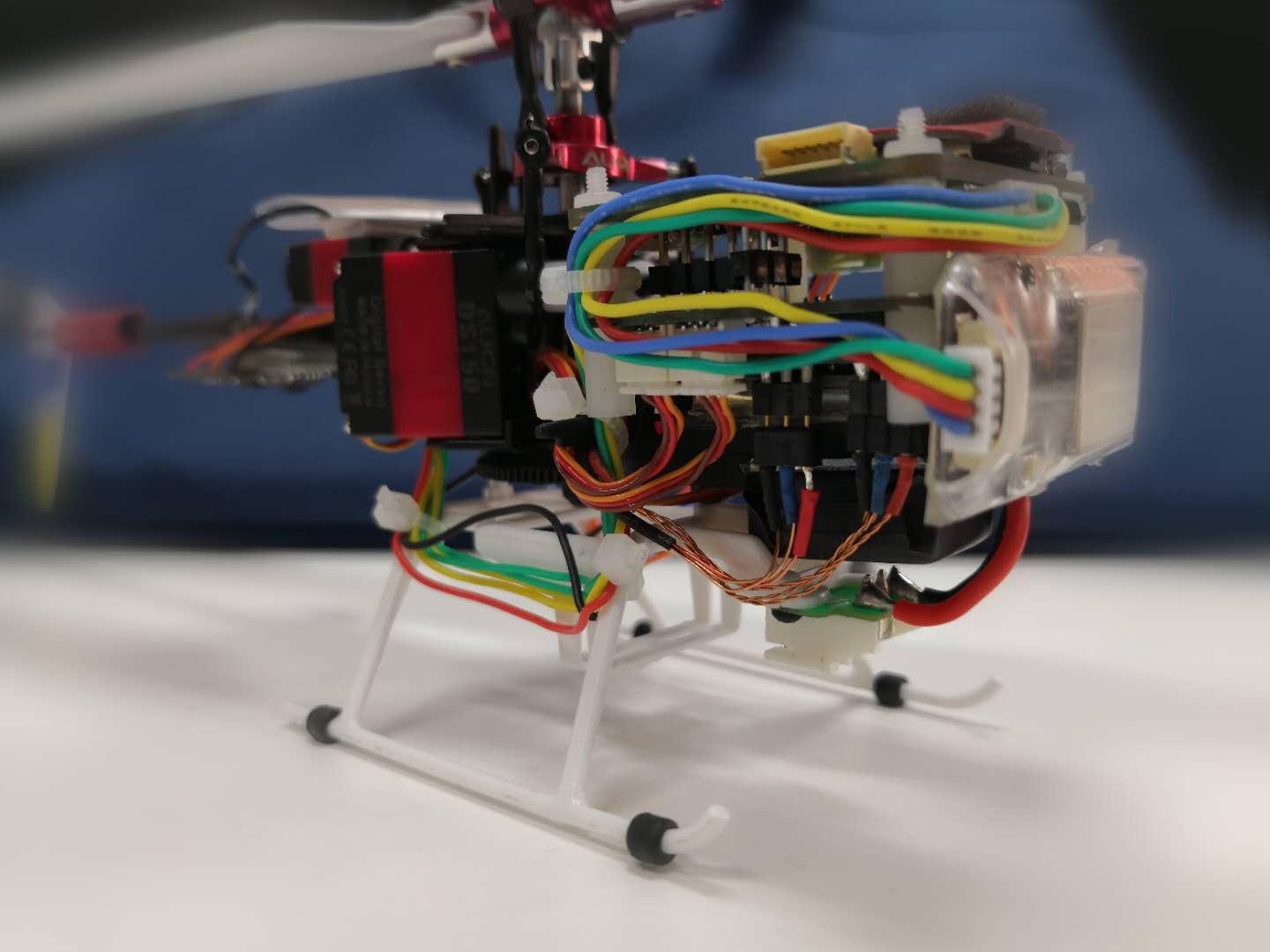
The frame of the Trex-150 is well-designed. I used the default parameters and the Trex-150 flied quite stable in the “stabilize” mode after adjusting the swash plate for less than 30 minutes and solving the vibration issue (which took me about 1 week).
My friends and I removed the socket originally reserved for ESP8266 and modified the hardware settings in ChiBiOS hwdef file to obtain a extra SPI port for the Optic Flow board.
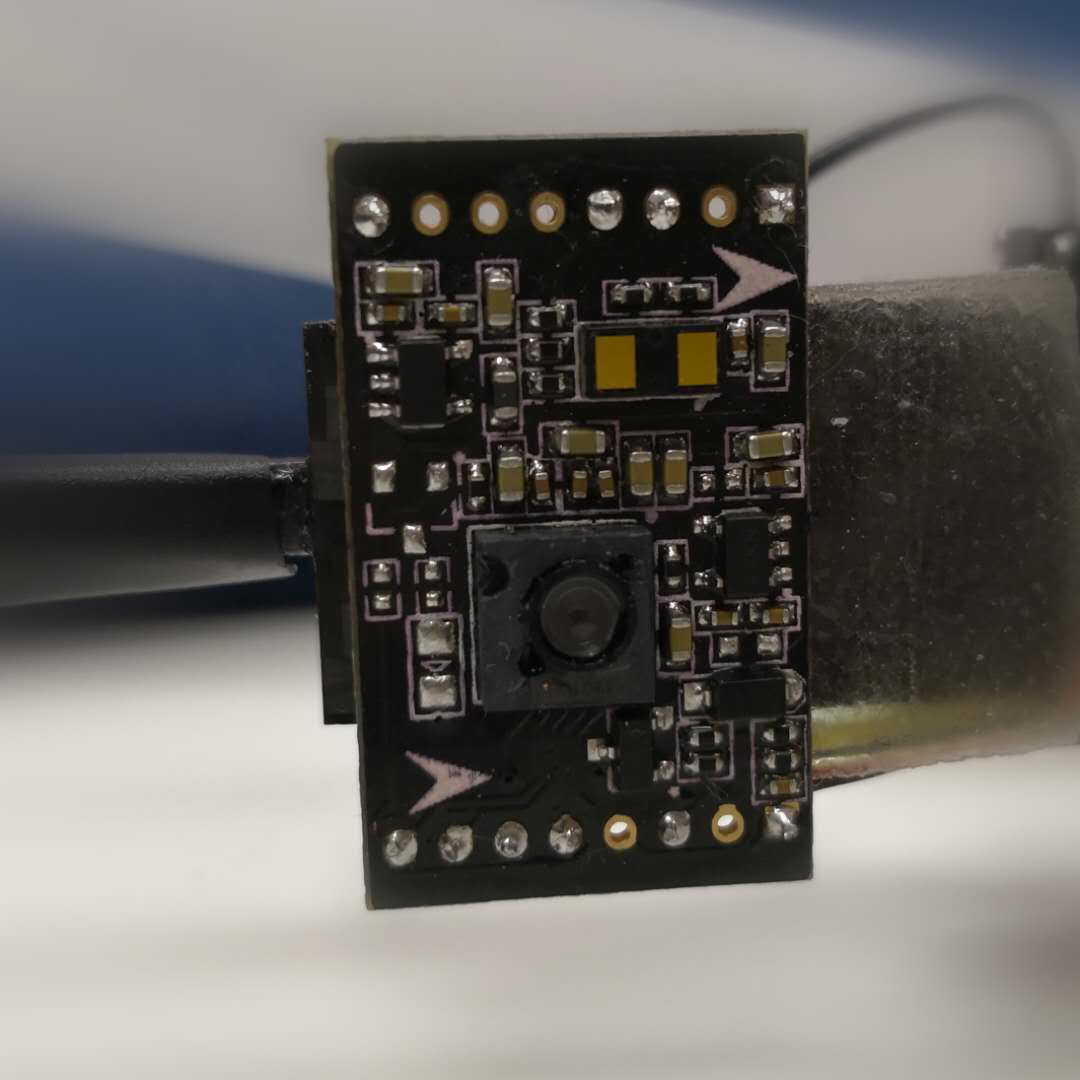
This board contains a PMW3901 Optic Flow sensor and a VL53L1X altitude sensor.
During the flight, we observed that the Trex-150 has a slight “toilet bowl” effect in loiter mode. However, I don’t have any experience tuning the PID parameters, neither in attitude loop nor in position loop. Thus I used the default parameters for both loops, but this may cause serious problems when I use the heli in AUTO mode.
I have two questions that need advices:
-
Some suggestions about parameter tuning, e.g. Which parameters have stronger relationship with relieving the effect of “toilet bowl”?
-
Suggestions about other parameters. Is there any common parameter that is improperly set?
(Edit 1) Before the flight described below, the param PILOT_SPEED_DN happened to be 0, and PILOT_SPEED_UP to be 250, which I am sure that I haven’t changed before. This caused the Trex-150 to rise up vertically and this behavior was uncontrollable after it was switched from “stabilize” to “loiter”. The phenomenon have disappeared since I changed PILOT_SPEED_DN larger than 50. Last year, I had another Trex-150 with Pixracer crashed at the ceiling when the receiver stopped working and the params of the two helicopters are basically the same.
Here are the log file and the param file.
20190409_150_OF.param (14.1 KB)
I will try to figure out how to upload video as soon as possible.
(Edit 2) The video is now available at https://drive.google.com/open?id=1snakvv2wvy85CkS9A-3jZno-cq3-7Kng .
Thanks in advance.
Richard