Hi Team!
We have got two flight with the same Mission File as base, but the second mission was modified to include some pattern flights. We started both Missions in the same place, just 10 minutes inbetween.
The first flight was perfect, but in the second flight the plane did not climb but started to transition, right when he hit auto in 5m height.It just switched to transition right away and accelerated to 25m/s. Nothing crashed, but it was too close to the ground to be safe.
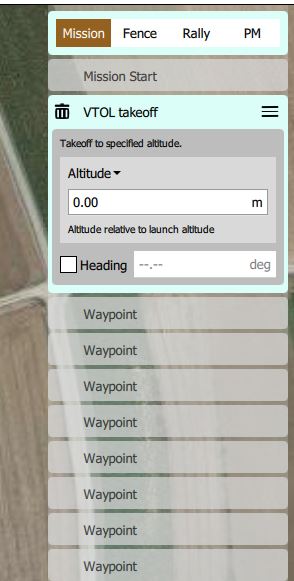
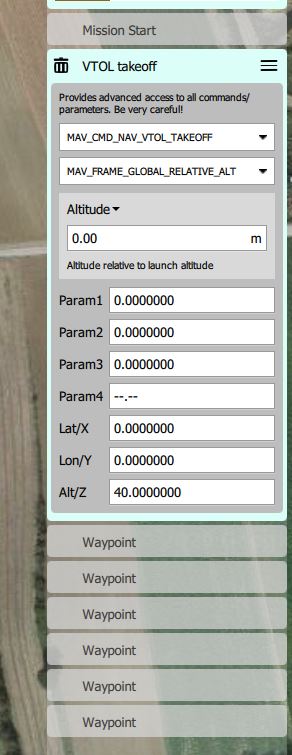
The files were planned with qgroundcontrol/variant of it. We set the takeoff (which is for plane) then set any waypoint which we change via the menu to VTOL takeoff, delete the plane-takeoff and move the VTOL Takeoff to designated starting point. The plane normally does the transition above the point where we switched to auto. So if we use 40m transition height and switch to auto in 20m height, then the plane would do the transition in 60m AGL. After saving the file and reopening it changes the 40m to 0 meters as altitude, but it is still saved as 40m in the “show all values” menu
any idea why the plane did the transition in the second mission right away?
You can see in Log 66, there is auto, then it climbs and then messages “transition wait” pops up. In Log 67 there is auto and transition wait right after each other.
Any idea why the plane did the transition in the second mission right away?
Here are bin, tlog and plan files
https://www.file-upload.net/download-14528109/2Missiontransition.zip.html
Have a nice day and thanks in advance