Hello,
I’ve flown my repaired X8 Skywalker and… all went fine except for the heading problem during the transition. Don’t think I’m obsessed about it :), let me explain my motivation. I have 1 hour drive to the nearest place where there is lots lots of open space, and say 15 mins to many locations which are great but have some patch of clear “runway” with obstacles at the sides. Since years I have flown (non-VTOL) airplanes there and I greatly enjoy the TAKEOFF mode with the locked heading.
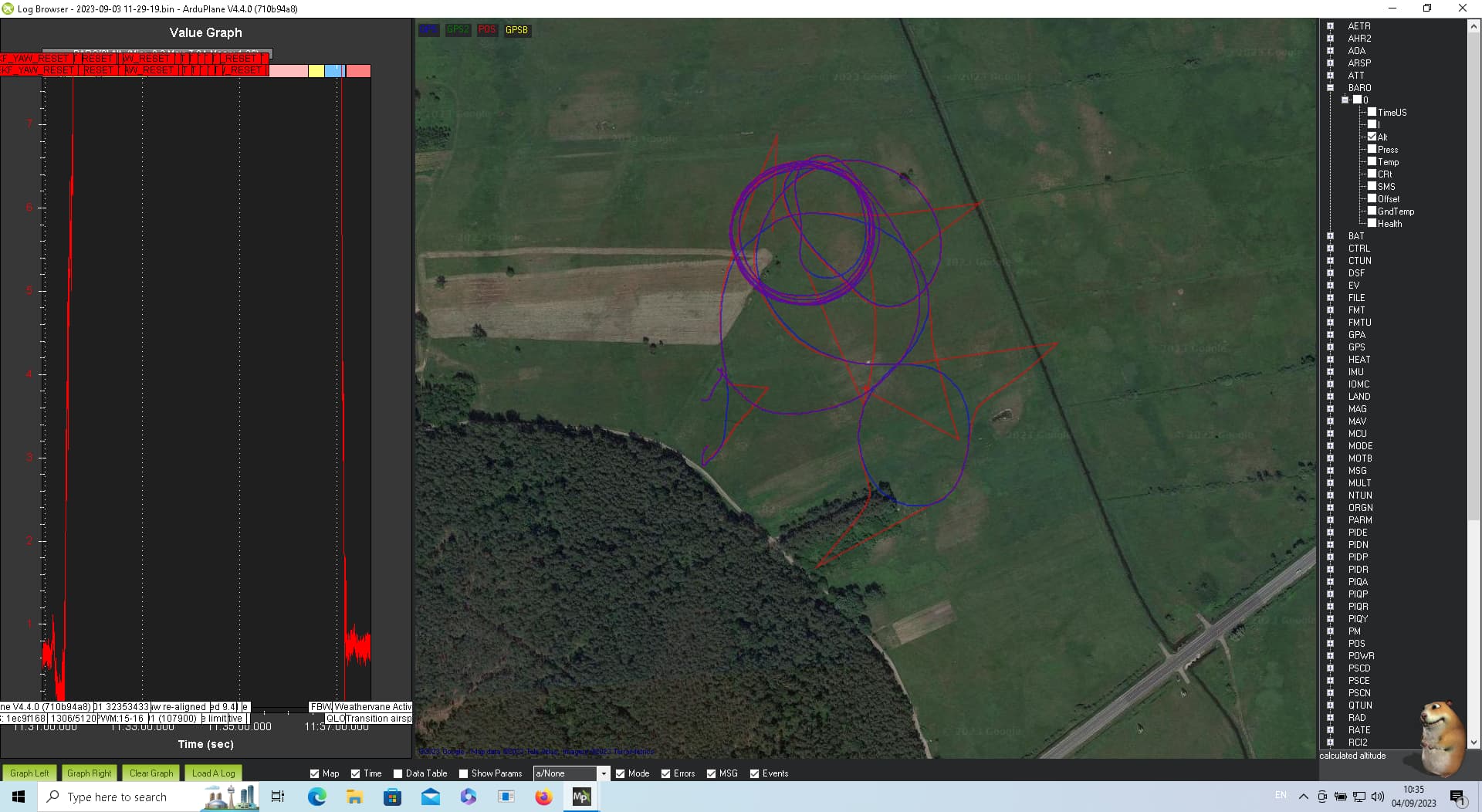
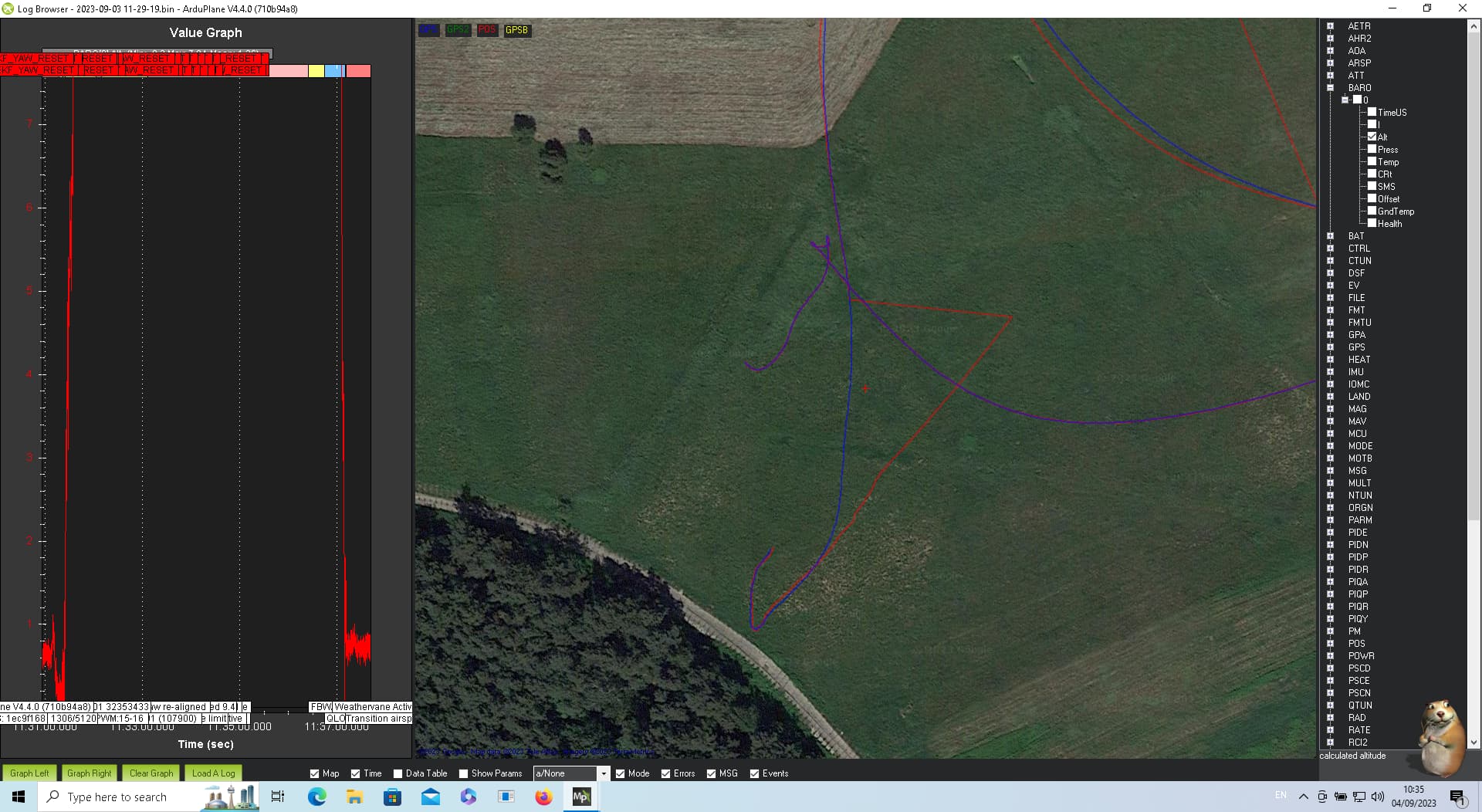
So going back to the Skywalker… after launching and soon after initiating the transition, it has turned from NE to N (45-60 deg) when the speed was still low. Then it has maintained this heading and the flight was fine, I’ve tested even the LOITER mode and done some circles. On the map I can see that the red and blue paths diverge for some time, I wanted it to follow the red one but it has followed the blue one during the launch. What does it mean? Is there a problem with the setup? (bad compass/gps? not enough authority to maintain the commanded yaw?) I really don’t like this “random” turns and being not sure about the departure/transition path.
Of course I could fly vertically to the altitude allowing for clearing the obstacles, but I don’t like this idea. Risky if something goes wrong to be high and with no speed. Also it puts more stress on the “vertical” battery.
The log file
I’ve added weathervane switch, why it reports channel “LOW” and “HIGH” in text messages, and not “OFF”/“ON”? I hope it was off.
I would love to have the analog of the PLANE’s TAKEOFF heading lock.