I have recently been flying my traditional heli AlZRC X360, very happy with the setup and performance.
In the course of a little Auto mission with Takeoff, I decided to switch to Stabilize mode but forgot that Throttle was at zero (yeah stupid…). The Heli made a sudden descent and even trying to reverse the descent I didn’t make it in time to climb the thottle and ended up having a small crash. Virtually no damage, just a chip in one of the rear blades.
Even so, knowing that the vibration would be higher, I decided to take the risk and continue to fly (still had several batteries to spend  ).
).
I did a mission again, all without problems, but after the mission I decided to make another flight in Stabilize and I got the impression that the Heli was not responding to my input (maybe it was just optical illusion) to go to the left and I ended up, perhaps on impulse, turning off the heli in the air, suffering more impact damage (this time real damage).
When analyzing the logs, I can’t see any sign of error, despite observing great vibration. I check also the Rate Outs but could not find any signs of noise.
Can someone be so kind and help me to check the logs for some failure that I can’t see. I just want to make sure that everything was ok, and it was a Human wrong perseption
This heli was running a MatekH743 v2 and there was no wind on that day.
I am posting here the data before when everything was running smoth and after where the issue was apparently observed here(apparently).
Thank you!
@bnsgeyer
@Pedro_Claro sorry to hear about your crash. I took a quick peek at your data. everything seemed like it was working fine.
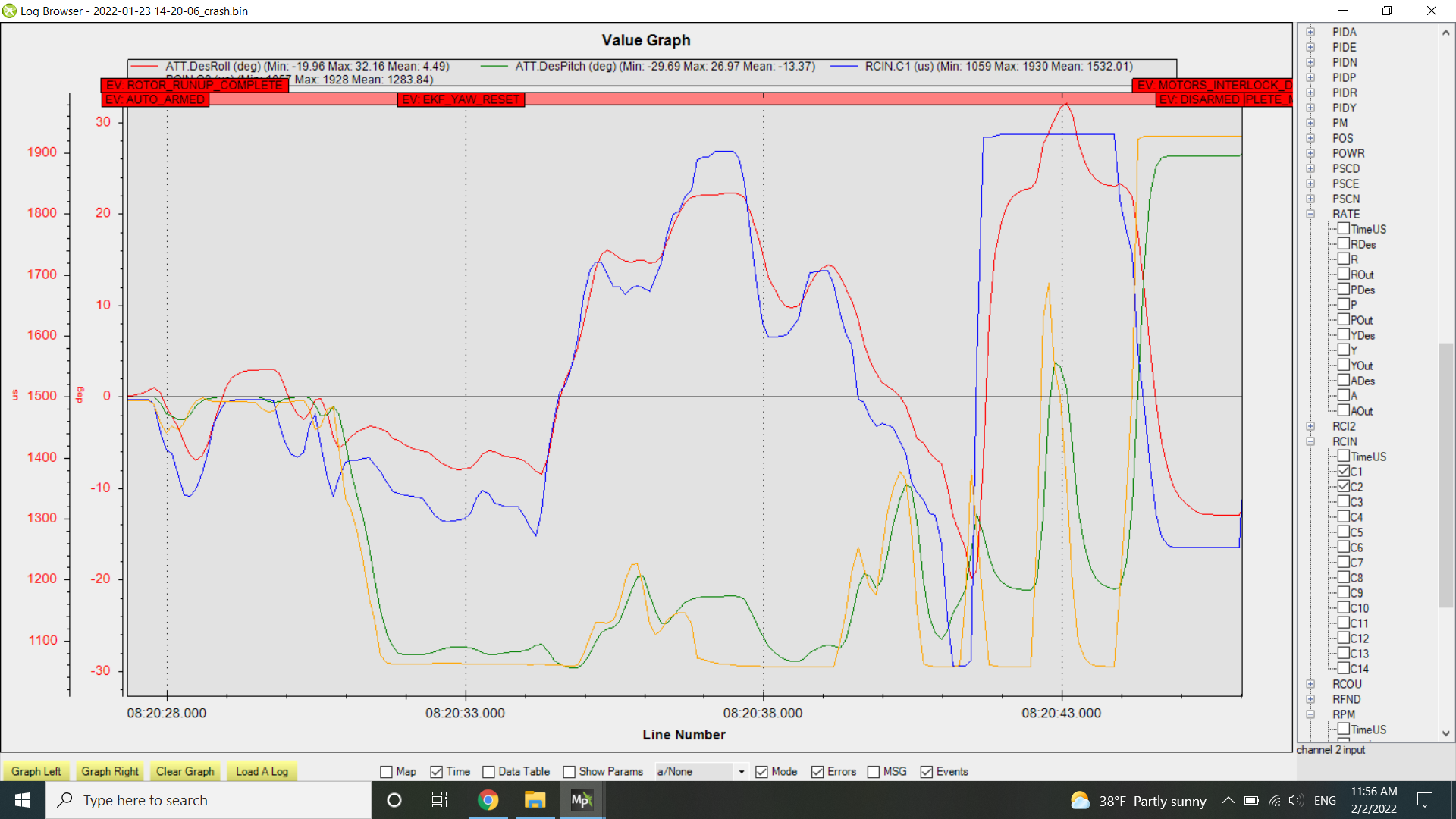
Here the desired attitudes match the stick inputs for pitch and roll
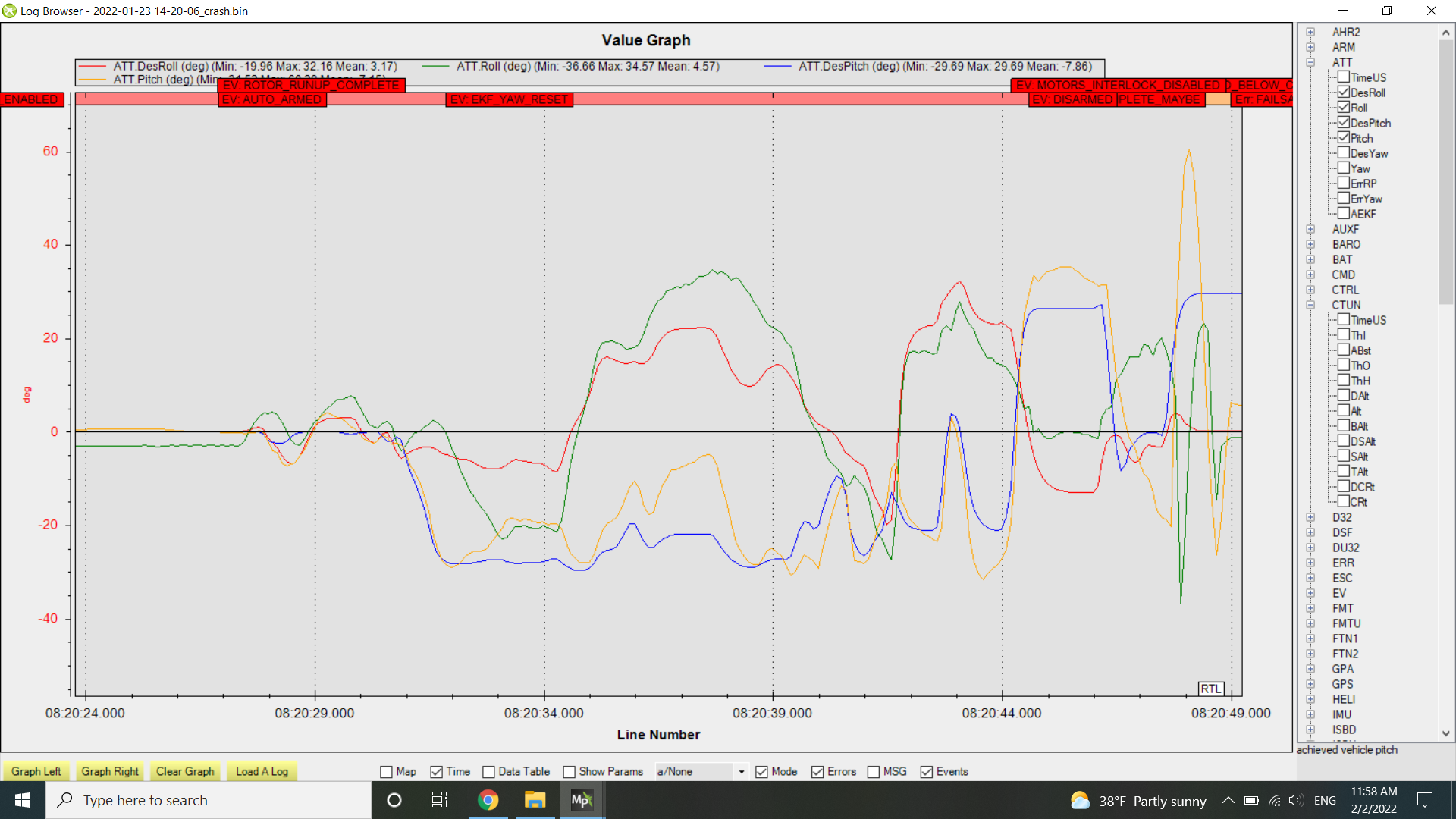
Here the attitudes match the desired attitudes fairly well.
Even looking at the yaw axis. the stick inputs matched the desired rates reasonably well. and the desired and actual heading match well.

So I don’t think it had anything to do with the flight controller or aircraft.
Regards,
Bill
@bnsgeyer Thanks for your review !
I think it was an optical illusion, and I overreacted maybe because I was waiting at any moment for a possible problem due to the rear blade being slightly broken. But I’m glad to know that ardupilot is quite robust even with mechanical imbalances.