I used my Alzrc 420 RC helicopter, 420mm main blade model, equipped with CUAV Pixhack V5 flight control, using AC3.6rc7 FW, and replacing M8n with CUAV C-RTK high-precision differential GPS module (M8P solution). After careful adjustment of the helicopter’s PID to be as accurate as possible, several flight tests were conducted. The results of the flight look good.
An open playground for the test base

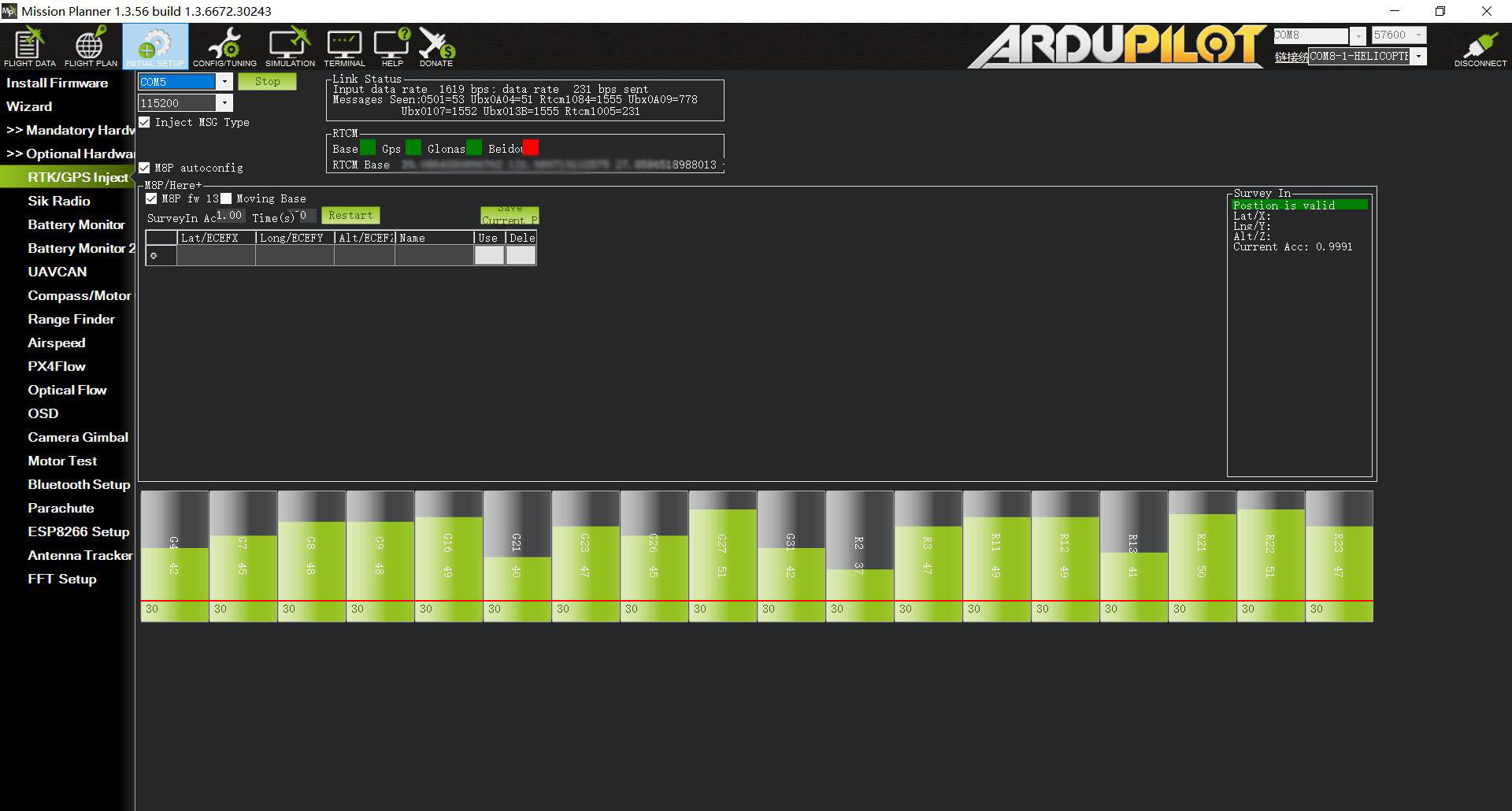
The base station setting accuracy is 1m, and the base station can locate it in about 2 minutes.


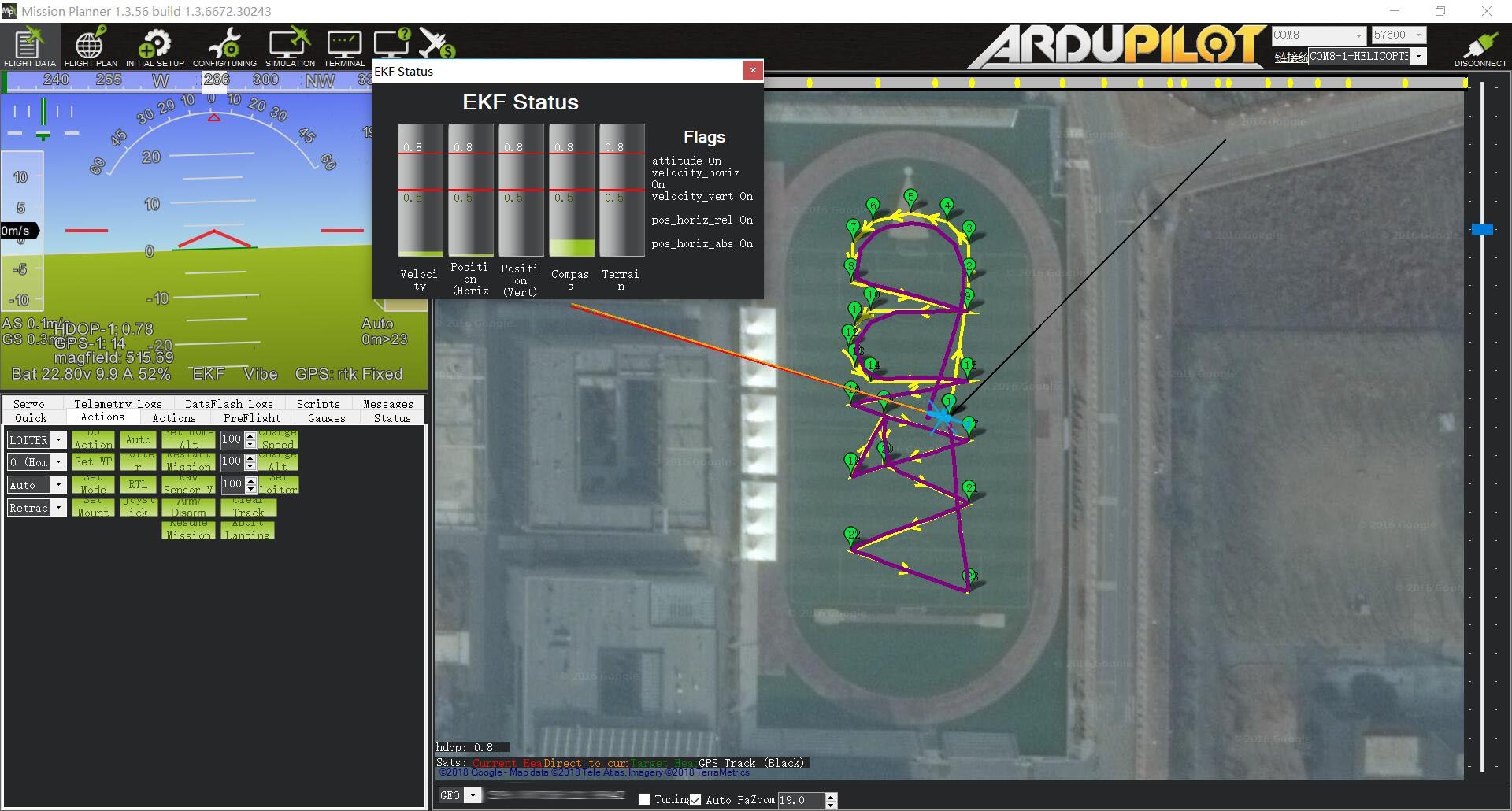
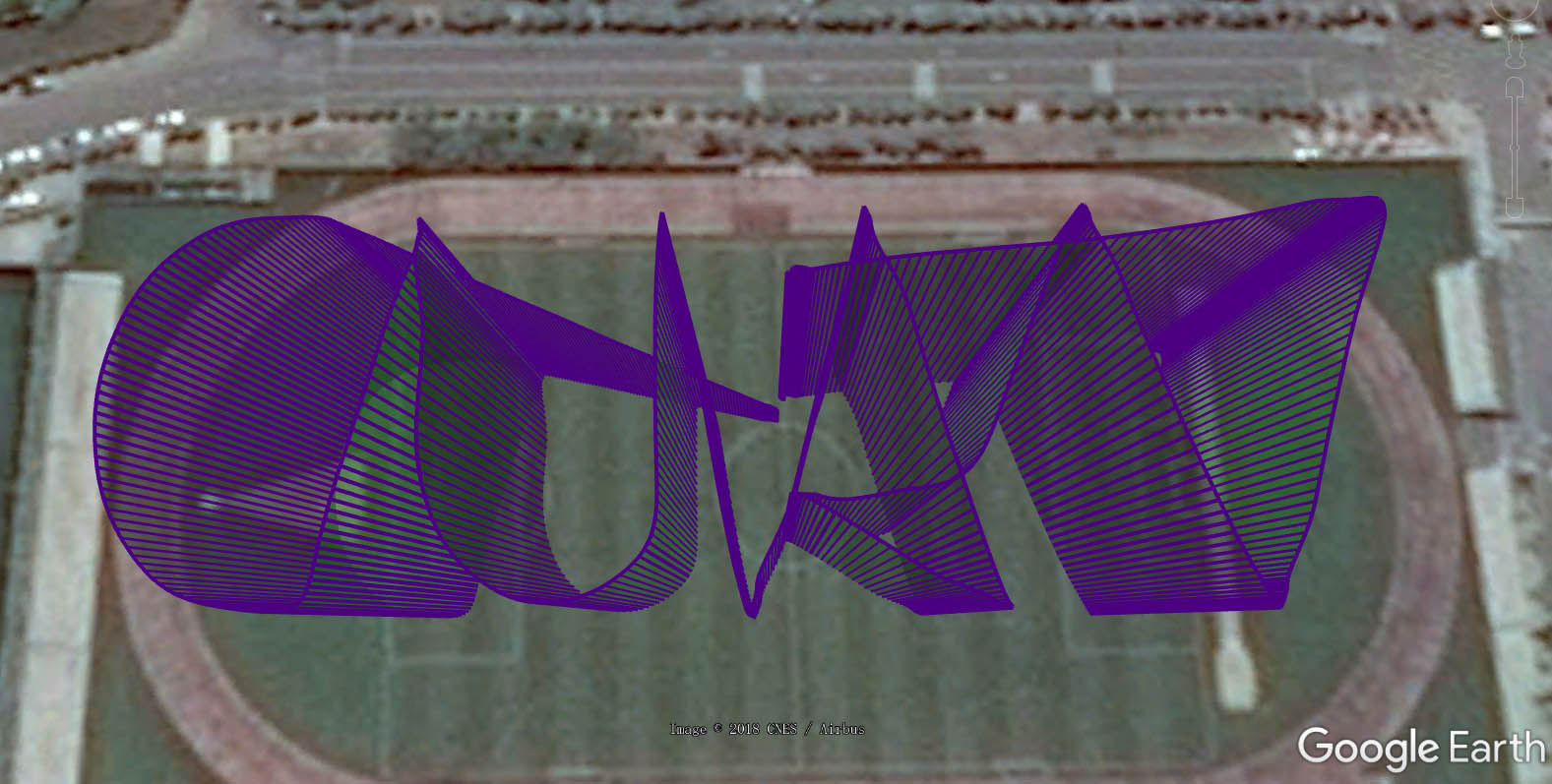
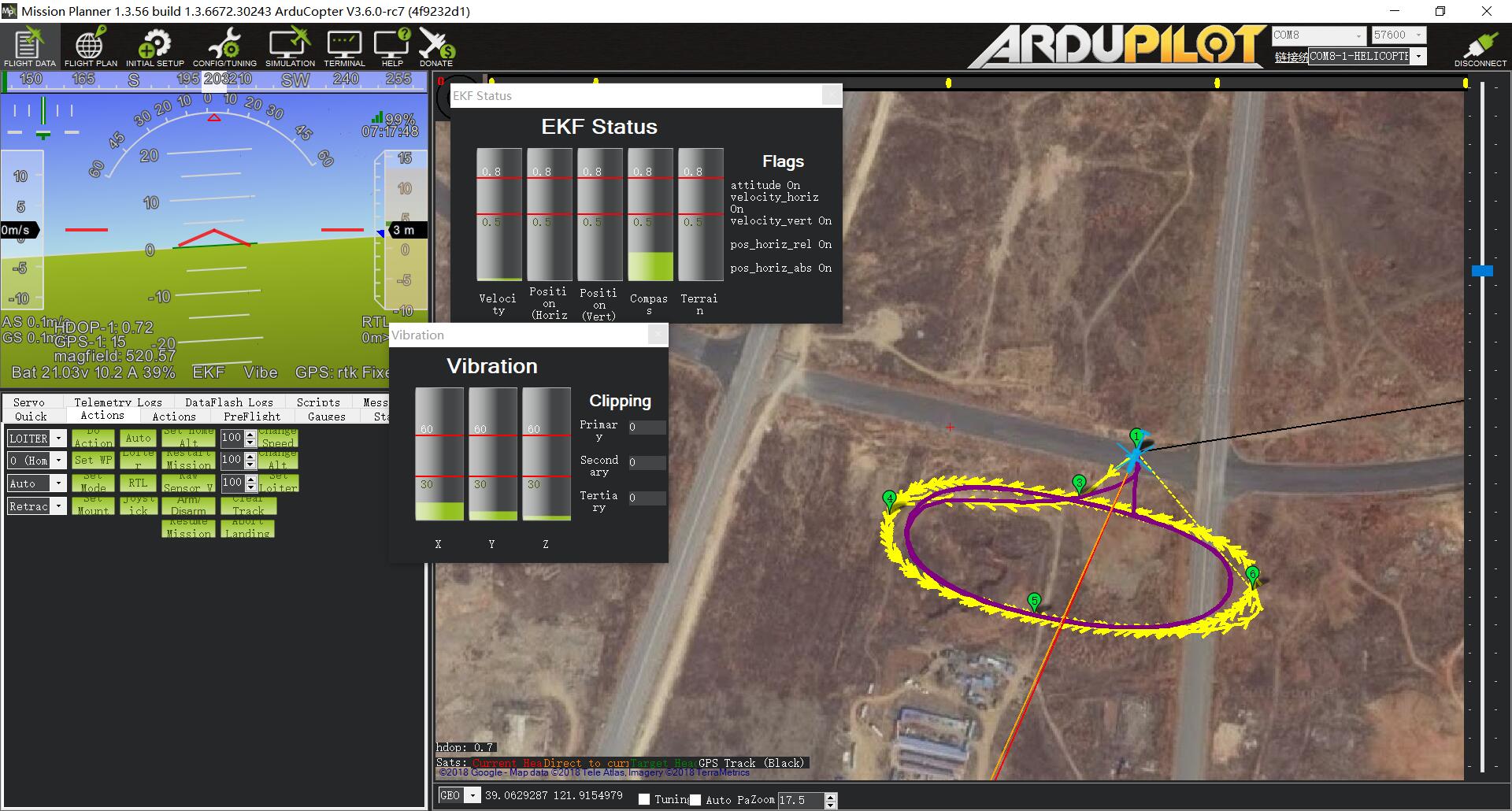
Edited an automatic waypoint task with the “CUAV” letter as the route, height 30m, and set do jump to 3 repetitions
Another venue to test spline waypoints
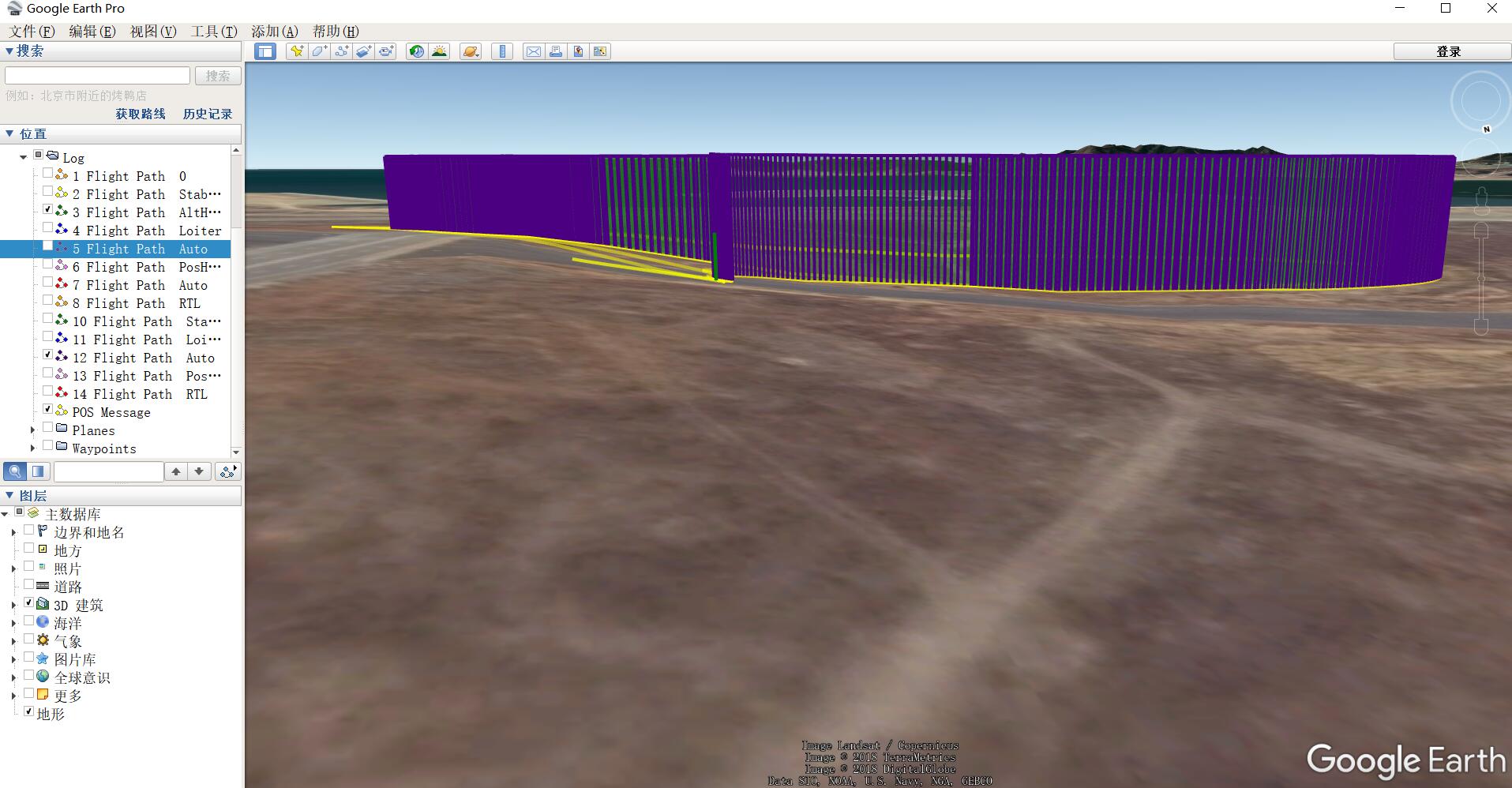
The 3D height of the RTK GPS remains very good, far better than the height of the barometer
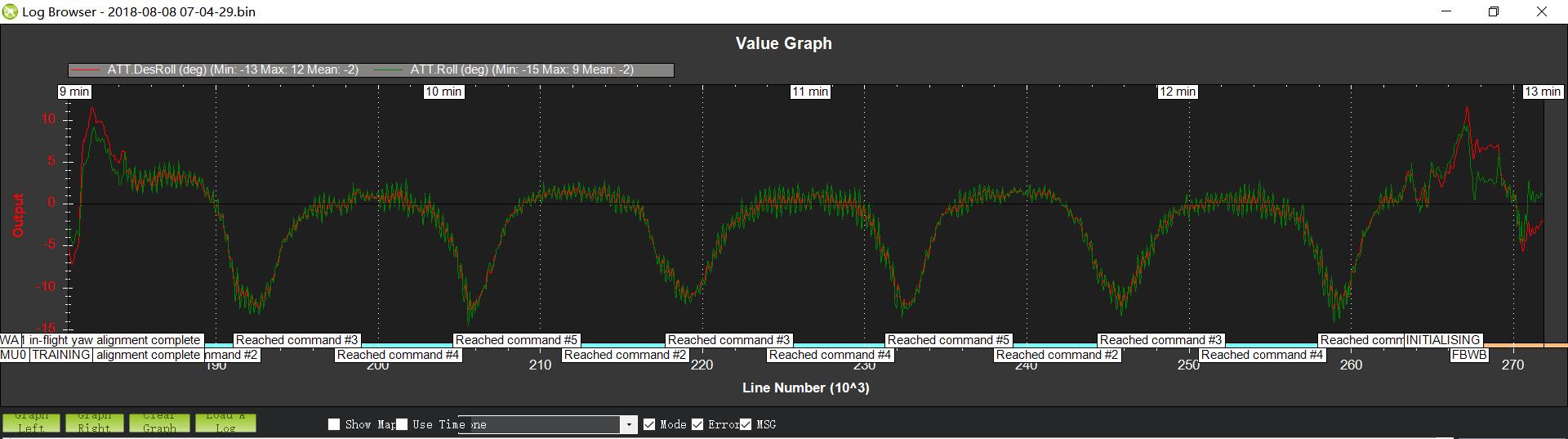
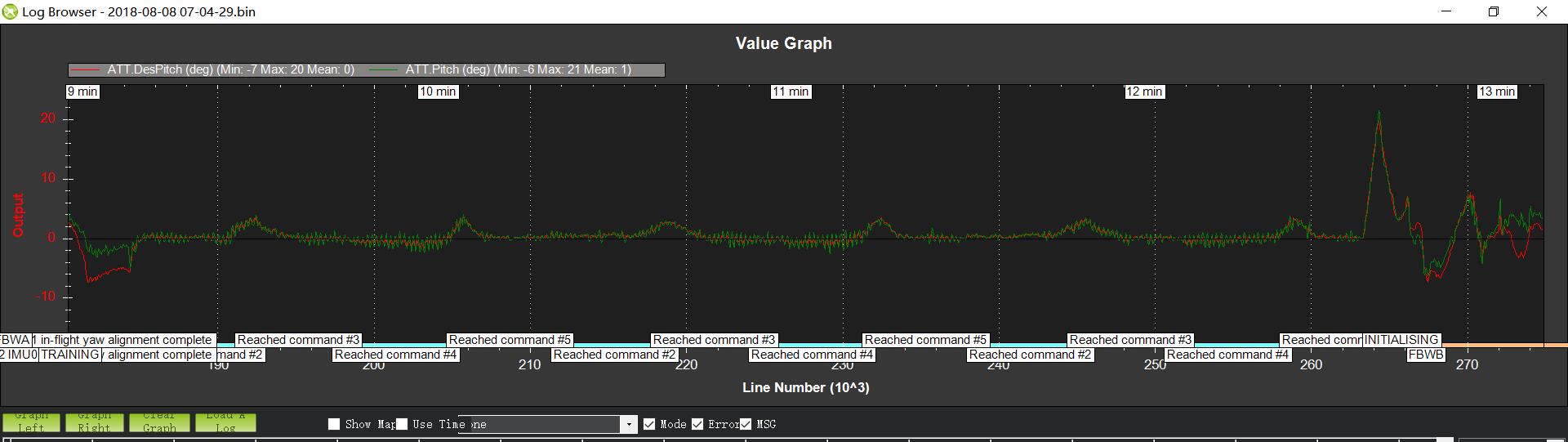
The adaptation of PID has been very fit!
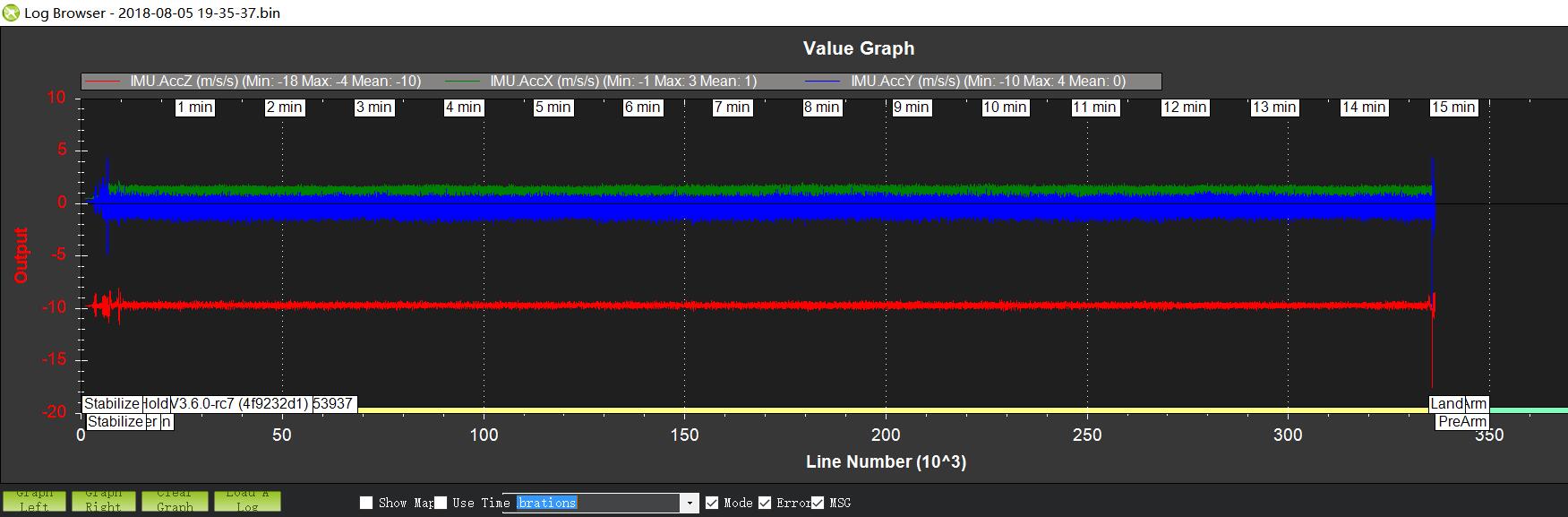
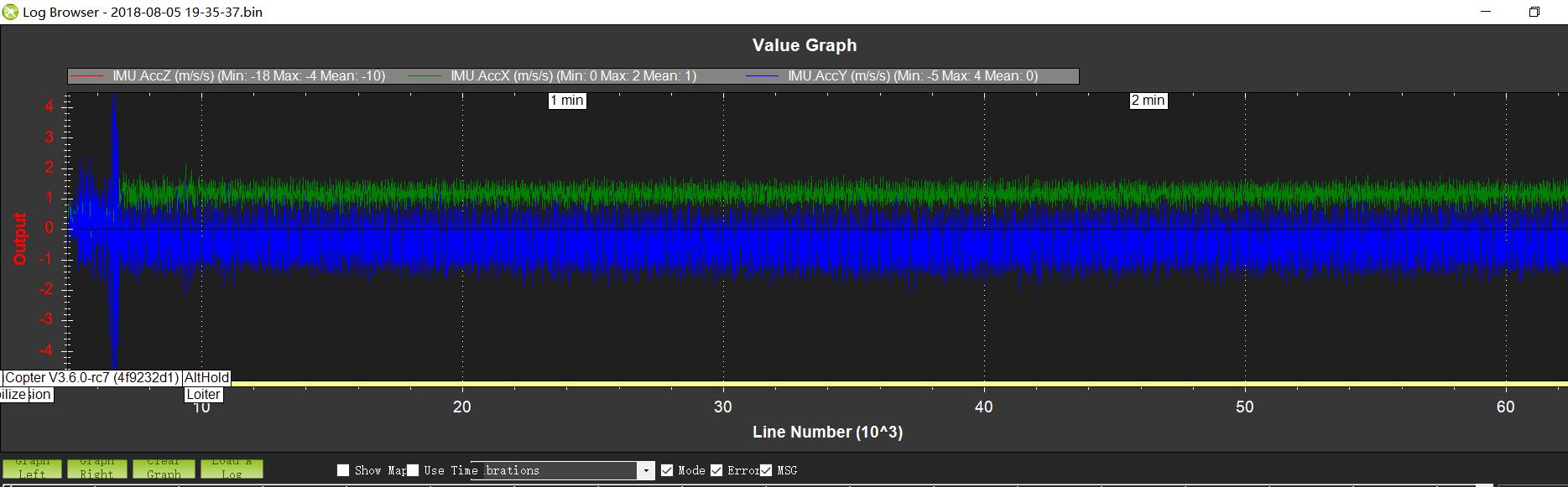
The vibration control is also very low. As a helicopter, this vibration value is already very good.
Test the automatic waypoint again at dusk on the third day


The accuracy of a set of Loiter hover test points for a complete battery, with a maximum offset of around 30 cm