Since this is in the TradHeli section, these are the settings for the position controller and loiter controller for New Loiter that worked well in my heli. Please note the speed setting for Loiter is quite important to get the braking to work smoothly. Your old setting for ACCEL_Z_P should carry over to the PSC_ACCZ_P.
The PSC_VELXY_D is a brand new setting (the others were moved to the PSC from old settings) and if too high may cause porpoising in auto flight. Leonard has indicated that PSC_VELXY_I should be half of what PSC_VELXY_P is if you adjust those.
PSC_ACCZ_D 0
PSC_ACCZ_FF 0
PSC_ACCZ_FILT 20
PSC_ACCZ_I 1
PSC_ACCZ_IMAX 800
PSC_ACCZ_P 0.3
PSC_ACC_XY_FILT 2
PSC_ANGLE_MAX 0
PSC_POSXY_P 1
PSC_POSZ_P 1
PSC_VELXY_D 0.5
PSC_VELXY_D_FILT 5
PSC_VELXY_FILT 5
PSC_VELXY_I 1
PSC_VELXY_IMAX 1000
PSC_VELXY_P 2
PSC_VELZ_P 5
LOIT_ACC_MAX 500
LOIT_ANG_MAX 0
LOIT_BRK_ACCEL 125
LOIT_BRK_DELAY 1
LOIT_BRK_JERK 250
LOIT_SPEED 3000
There is also new settings for maximum angular rate in the attitude controller. Left set to the zero default (which disables this setting), they did not affect the tuning of my heli.
ATC_RATE_P_MAX 0
ATC_RATE_R_MAX 0
ATC_RATE_Y_MAX 0
The final thing I noted was that the new Smart RTL appears to have a default of 2 meters between accumulated points, and 150 points
SRTL_ACCURACY 2
SRTL_POINTS 150
I got a MavLink notification from the ground station shortly into my first test flight that Smart RTL was disabled because the “buffer” was full. This feature “backtracks” where the heli flew for RTL, so it may not be all that useful for somebody flying auto survey flights on a grid flight pattern. You can disable it by setting SRTL_POINTS to zero and use the regular RTL.
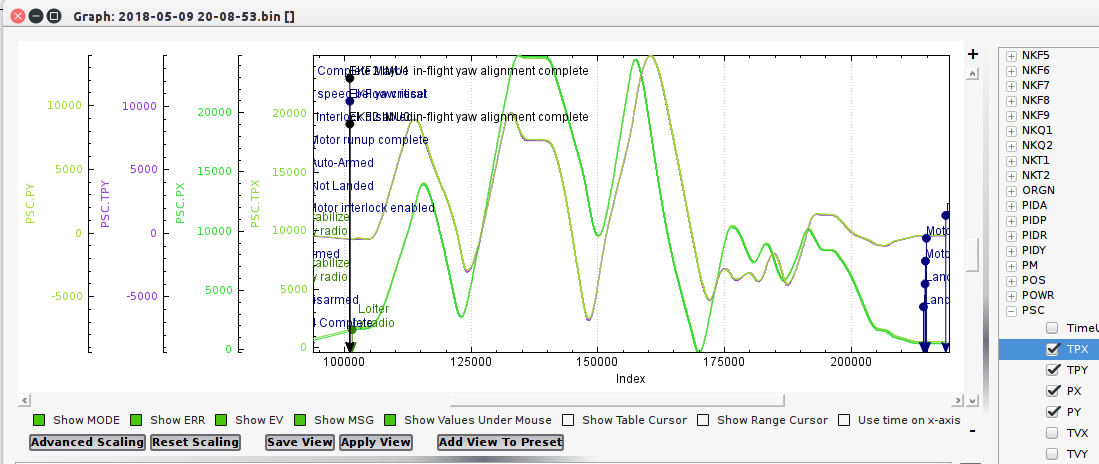
Would be good to hear feedback from other heli pilots testing 3.6-rc1. After yesterday I have accumulated slightly over 2 hours of flight testing, mostly in Auto Mode, and have found nothing that I consider to be an issue. The EKF altitude estimate problem many noted in 3.5 on Auto flights appears to have been resolved in 3.6 with the updates to the EKF.
This was my first successful Auto flight with 3.6-rc1 after tuning the PSC and Loiter controllers. I flew two additional flights of longer distance and duration of a little over 45 minutes each yesterday in much stronger wind gusting to 22kts. The longer flights duplicated the accuracy of this first one.
All the flights were flown with piston heli with the governor disabled to test the performance of the new five-point throttle curve. With the new throttle curve tuned properly it maintained headspeed 1,580 rpm, +5, -10, in my Raptor 716 no matter if it was in cruise flight, descending glide cruise, or making hard climbing turns where it pulled some serious collective in the wind.