Hi everyone,
I forgot which PID initial settings I need to make for my trad helicopter. Can I simply enter the diameter of the single rotor in the Initial Setup tab? I think that’s a method only for multicopters, right? I’ve already done this successfully, but unfortunately I forgot…
Thanks!
greetings from berlin, Mosi
Mosi,
Don’t use the Initial Setup Tab. It is only meant for multicopters. There is not much that is done with Heli’s to initially set PIDs like multicopters. We just normally use the defaults before starting to tune. On the initial flight, if you see oscillation in one axis which is normally the roll axis, then you will halve the P and D gain for that axis and then fly to see if it still oscillates.
Post here if you have any issues. What is the size of the heli?
Hi Bill. Thanks for the quick reply. I’m not sure if I’ve already changed the PID values. But it seems to me that the values haven’t changed so far. Would they be reasonably reliable?
The rotor has a diameter of 1 m. I remember: My first Ardu-helicopter had a 1.4 m rotor, and during its maiden flight, it oscillated a bit. How should the PID values theoretically change if the rotor gets larger/smaller?Processing: Settings_PID.png…
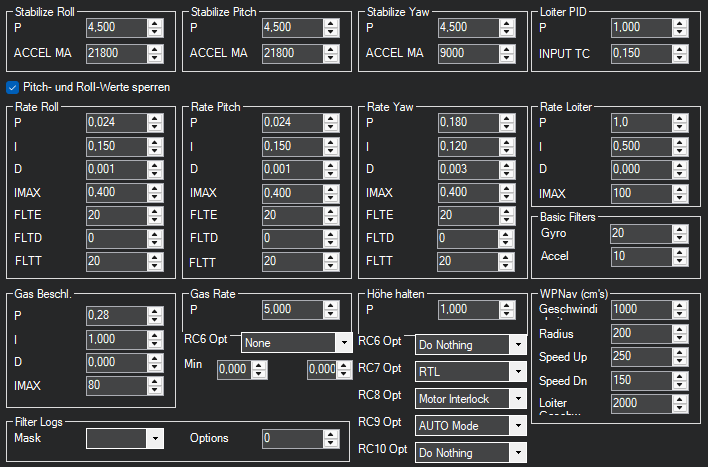
I’m very anxious about the next maiden flight because my perfectly tuned 700 helicopter crashed after changing the servo horns. The servo horns were a bit longer (20 mm instead of 16 mm). I, the stupid idiot I am, forgot that the values obviously need to be updated.
@MosiBerlin These Rate PID parameters look like the defaults. For a 700 size heli, the only one I think you should change is the ATC_RAT_RLL_D. make it 0.0001. That should keep the aircraft from oscillating due to the gain being too high.
1 Like