EDIT I just now looked at my RATEs (Pitch and Roll) and desired vs. output are way off. This is a replacement Pixracer and I obviously need to do some tuning with the VFF. I just loaded my old settings a flew, which seems to have been the wrong thing to do.
I did do an autoanalysis, and it looks like my compass and GPS are really wonky. I also just saw that a beta version of APM:Copter is out that supports my new GPS/compass. I am going to try that out and see if it holds position and not get so many messages.
I am having a very repeatable problem with a new build. When I hit LOITER, the heli slowly climbs, and starts oscillating in the roll axis. It also has difficulty holding the tail steady. If I hit loiter at 15’, it will easily climb to 50’ and then I bring it back. As it comes back, it is nearly unflyable, even in STABILIZE mode. Normally it is rock steady in stabilize.
It seems like after I put it in LOITER, it like wipes my PIDs or something. Or it messes with the code. This is way over my head (no pun intended).
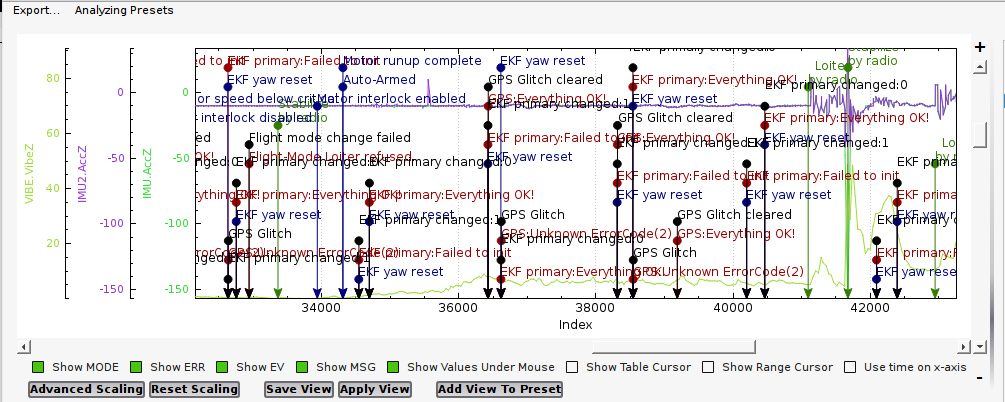
The vibes look pretty good, although comparing AccelZ on the IMU’s shows a divergence (aliasing) in Loiter, which is causing the climb. This is normally caused by vibration issues. But I wonder if you don’t have a hardware problem with this one?
Any ideas on what causes this, and what I can do? Can I “force it” to use one filter?
Funny enough this is my second board and the first one did the same thing (lane changing).
Vibes are probably getting bad. The plastic blades are getting pretty beat up and I planned on putting on my spares. I’ll try to balance them, but normally micro blades are pretty good.
Chris
I have such a little original Blade 130 X sitting here on my shelf ( retired - 4 years old). I wouldn’t dare to put a pixracer, plus GPS-compass inside that mini-heli. It is nearly all plastic and not build for extra weight. There are metal extras offered for that and I don’t know if the upgrades would cope. Just my opinion.
It is the smallest helicopter project I’ve seen done with ArduPilot. So from that standpoint it’s kind of cool. I don’t think Dave intended it to be a full-fledged UAV, more of an experiment to see if it could be done.
Looking at the vibes, they’re not that bad, but being a plastic frame with nothing to really damp them it could be worse than it appears. The characteristics of what Dave describes are consistent with excessive vibration.