I got the tracker (AT v1.1.0) working to track (not exactly) the quad.
But during tracking, the tracker does not point exactly to the quad, either in altitude (pitching)
or in left and right position (yawing offset ). But it follows the quad only in the direction of movement.
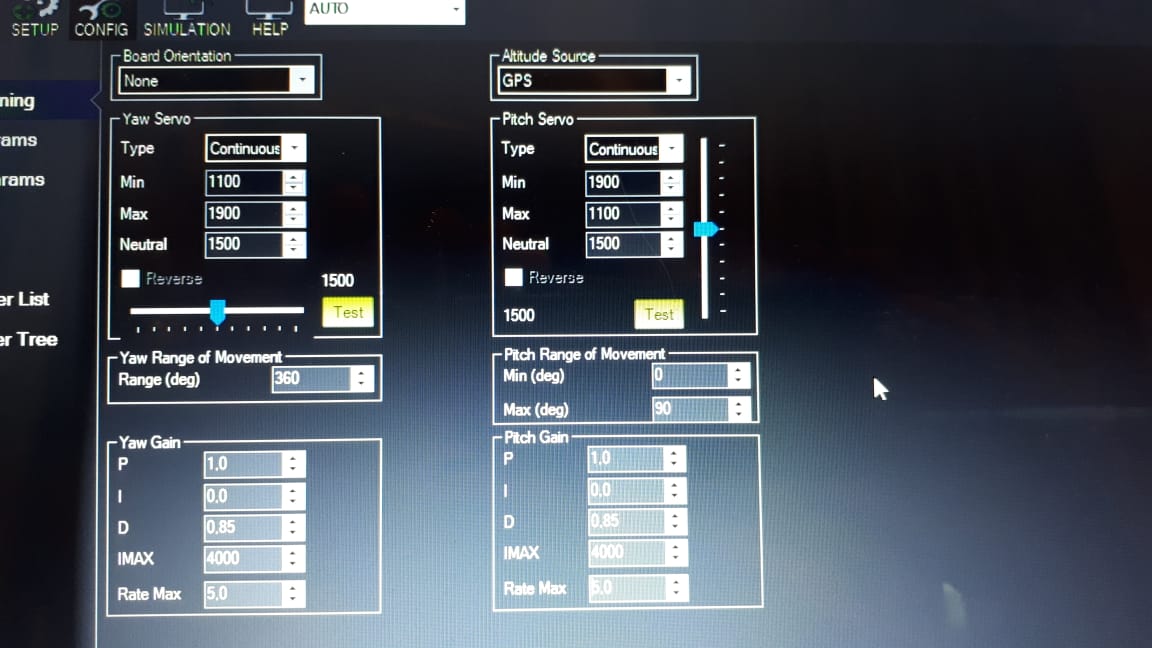
Attached is the parameter for trouble shooting. Could it be the P, I, D settings of pitch and yaw ?
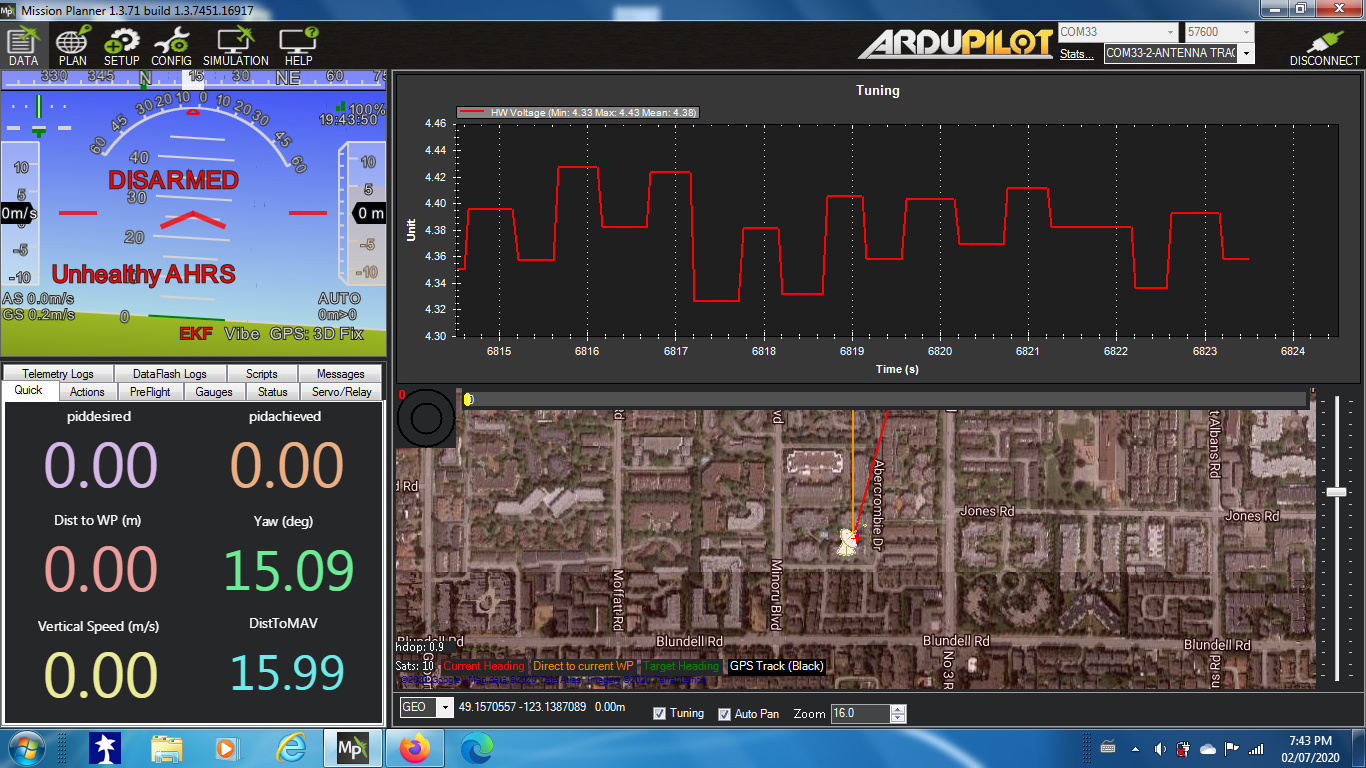
But I cannot check both Piddesired and Pidachieved in the “Display This” window. When I check the second , the first will disappear in the “Display this” window. How do you do that ?
Also after clicking Tuning, I got “HW Voltage” graph displayed, and I cannot get rid of it, even after exit and enter again(see attached). And the PIDdesired and Pidachieved never get displayed. Pls advise.