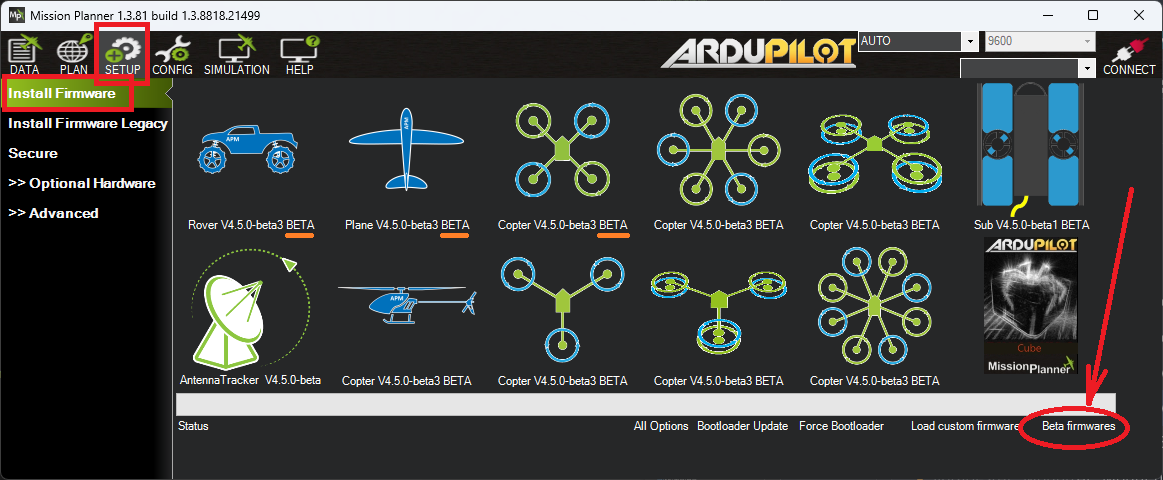
Tracker-4.5.0-beta3 has been released for beta testing and can be installed using Mission Planner or QGC’s “beta firmwares” links. Alternatively it can be directly downloaded from firmware.ardupilot.org.
The changes vs -beta1 (there was no -beta2) can be seen in the ReleaseNotes and they’re also copied below.
Board specific changes
- added PixFlamingo F7 board
- support ICM42688 on BlitzF745AIO
- fixed IMU orientation of CubeRedSecondary
- enable all FPV features on SpeedyBeeF405WING
System level changes
- improved robustness of CRSF parser
- reduced memory used by DDS/ROS2
- added filesystem crc32 binding in lua scripting
- support visual odometry quality metric and added autoswitching lua script
- allow for expansion of fence storage to microSD for larger pologon fences
- allow FTP upload of fence and rally points
- fixed vehicle type of ship simulation for ship landing
- make severity level depend on generator error level in IE 2400 generator
- speed up initial GPS probe by using SERIALn_BAUD first
- allow NanoRadar radar and proximity sensor to share the CAN bus
- added MR72 CAN proximity sensor
- only produce *_with_bl.hex not *.hex in builds if bootloader available
- fixed check for GPS antenna separation in moving baseline yaw
- added GPS_DRV_OPTIONS options for fully parsing RTCMv3 stream
- fixed logging of RTCM fragments in GPS driver
- fixed video recording while armed
- robostness and logging improvements for ExternalAHRS
- fixed RPM from bdshot on boards with IOMCU
- fixed accel cal simple to remove unused IMUs
- fixed float rounding issue in HAL_Linux millis and micros functions
- fixed loading of defaults.parm parameters for dynamic parameter subtrees
- fixed discrimination between GHST and CRSF protocols
- fixed bug in DroneCAN packet parsing for corrupt packets that could cause a crash
- fixed handling of network sockets in scripting when used after close
- fixed bit timing of CANFD buses
New Autopilots supported
- YJUAV_A6Ultra
- AnyLeaf H7
Other changes
- do relay parameter conversion for parachute parameters if ever has been used
- broaden acceptance criteria for GPS yaw measurement for moving baseline yaw
In terms of when will the 4.5.0 stable version be released, because we are releasing Plane, Copter, Rover and Tracker all together, it will depend upon how quickly we can overcome a few outstanding issues but in any case there will certainly be at least one more beta.
All testing and feedback is greatly appreciated!