I understand, but I fly surveys for Civil Engineering applications mostly, and yes forward lap & side lap are extremely important, and for me having the camera on a timer is not accurate enough, I always trigger based on distance and I post process correct my exterior with an L1 GPS onboard the aircraft using a GPS base, this results in an extremely accurate exterior. I’ve captured tens of thousands of frames this way and its extremely reliable, it just takes the right shutter cable and settings, on most flights I take around 1,350 frames and there’s never any gaps or missed frames.
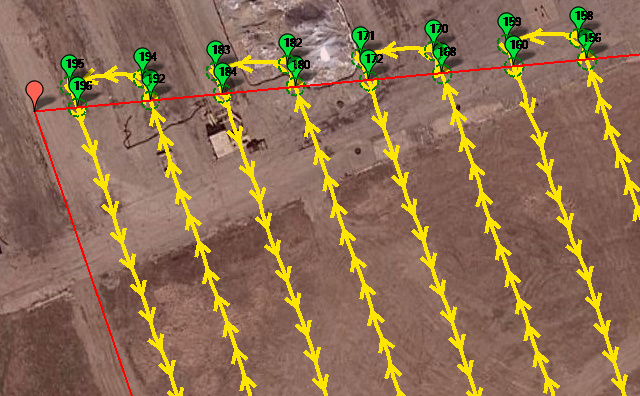
The only thing I don’t like about the spline waypoints is all the curves in flight lines, not sure that I can get them straightened out without a lot of work each time, I absolutely need straight flight lines.
I usually turn “break up starts” off being I don’t care if the camera triggers while turning, I just don’t use those frames, a lot of time if you leave it on, it will miss frames on the ends of the flightlines which is incredibly frustrating.
I still want to reduce the overshoots though, being many surveys I do are adjacent to busy highways and residential areas sometimes, and with the current Part 107 rules we’re not allowed to fly over people or moving vehicles, that’s the main reason why I’m interested in minimizing overshoot, this is really the only thing I like about multirotors, because they simply flare to a stop at the end of flightlines, slide over, then fly the next flightline back the other way, all with zero overshoot.
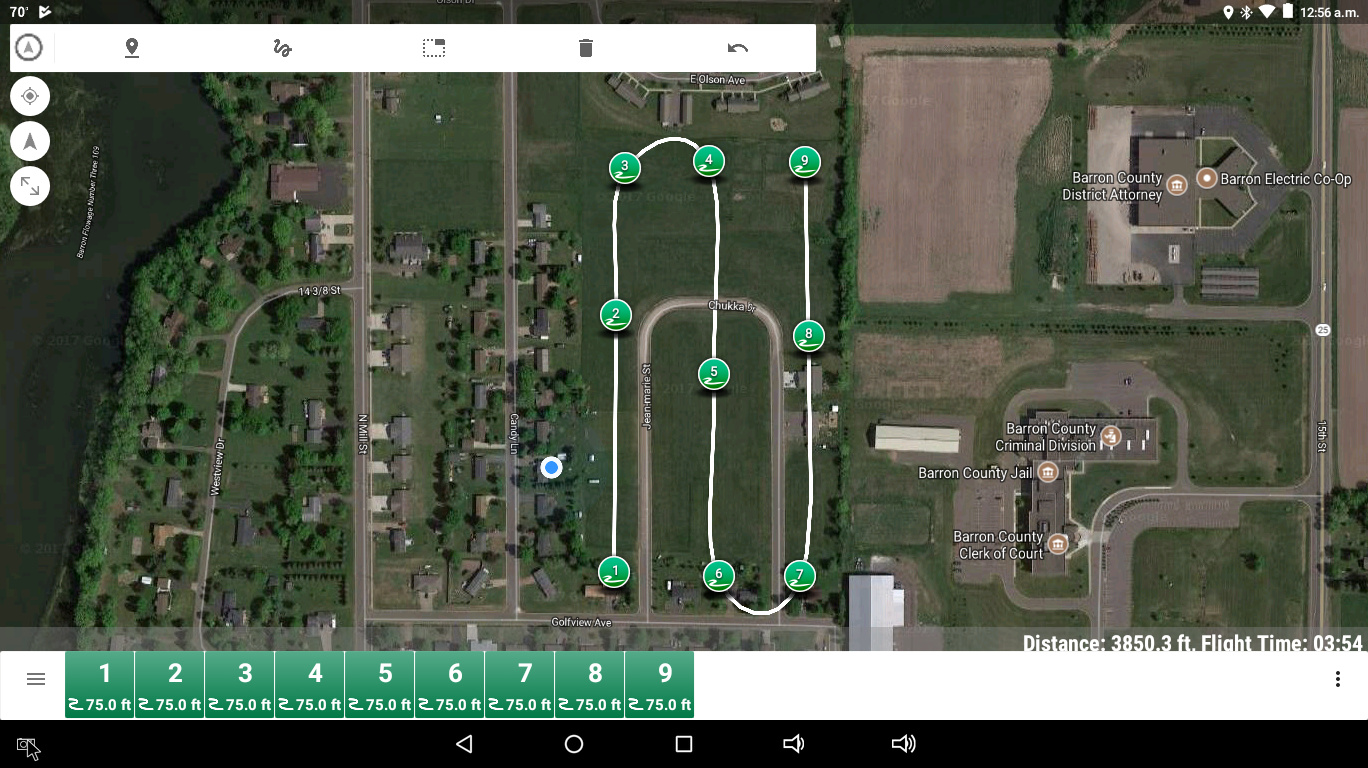
I guess I could always have it fly the same way multirotors fly with normal waypoints, flare to a stop at the end, turn 90, then turn 90 again, then accelerate down the next flight line, I know I would lose efficiency due to the hover/slow turnaround, but flight time will still increase over a multirotor overall.