Firmware - ArduCopter-4.0.4
Hardware - Omnibusf4pro (1mb flash)
GPS - Here+ RTK
Build - 5" props quadcopter
Issue:
Was just testing the status of RTK GPS and base station on the ground, was not flying the quadcopter, after testing the RTK GPS status i found some concerning data that raw GPS and estimated EKF3 POS data found to be varying too much while manually moving the drone along the ground.

LOG:
https://drive.google.com/file/d/1ispcUHky8vYh0R-G4ZOiRi7WwQiYnVj1/view?usp=sharing
Another concerning thing which i found later on this same drone is shown in this picture:
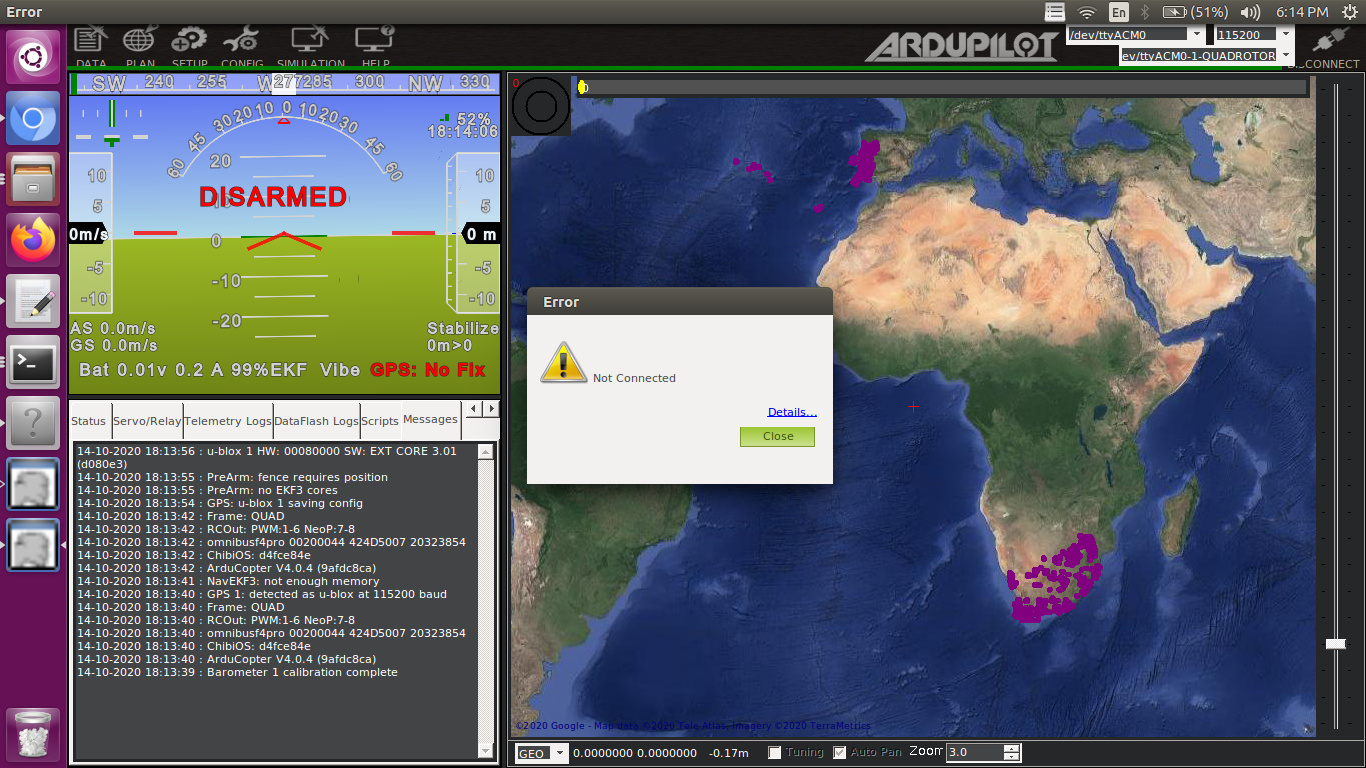
NavEKF3 : not enough memory
PreArm : no EKF3 cores
This though happened afterwards when i was connecting my quadcopter from mission planner, same quadcopter now started showing this issue frequently while connecting to mission planner, after rebooting, this prearm messsage does not show up, but it is reproducible on this particular quad, i noticed, this started occuring since i started calibrating compass via in-flight compass calibration, started using battery monitoring, and enabled logging for battery monitor, I don’t know if this message has any relation with the above mentioned issue