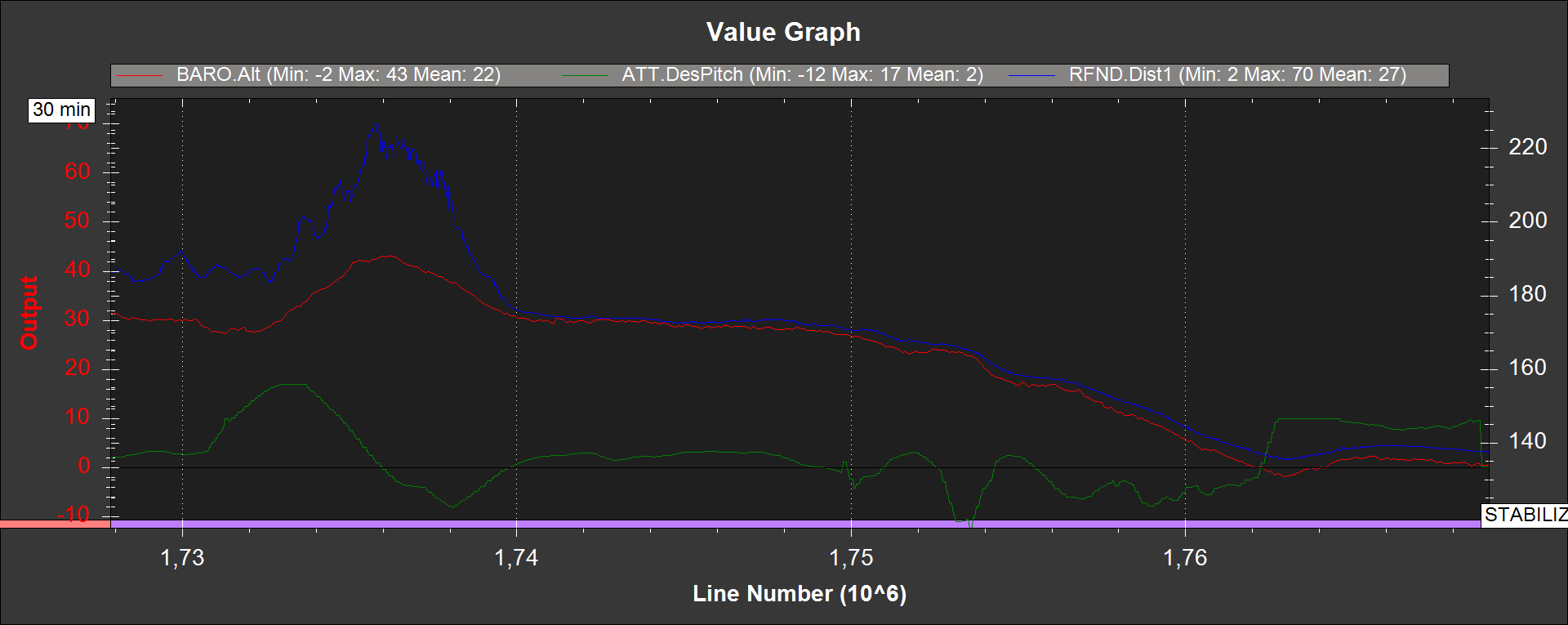
Hello guys, I need your help. Yesterday I tried the ArduPlane feature - auto landing. It didn’t work as I expected - the plane flew about 2 meters above the place when I wanted it to land. I changed mode and landed with RC control. Baro reached 0 but rangefinder not. As RNGFND_LANDING was set to 1 I thought that it should take rangefinder altitude as primary (during landing). That situation is after 1,76 on an X-axis.
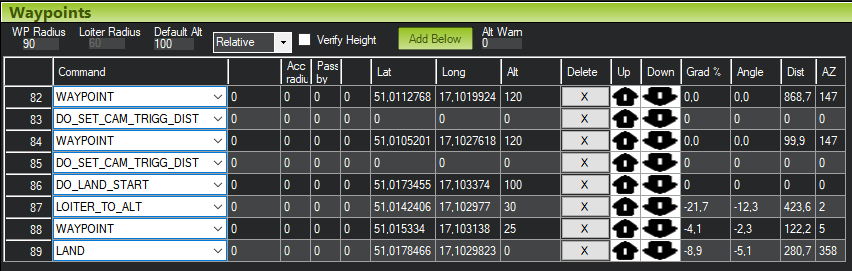
During log analysis, I noticed strange climb to 40m between 1,73 and 1,74. As you can see in the mission screenshot there aren’t any waypoint at that altitude. The plane loitered to 30 meters and right after that climbed 10-meter higher. I can’t understand why.
I’d appreciate if anyone can help me.
Best regards
Peter
The short story is that landing work quite bad in Arduplane if you want to use “advance” features as rangefinder or reverse, there are several unresolved problems .
If you look at your log there are several things
Flare point was set at 2 meters or 1,3 seconds from ground, it is recorded at 2,9 meters
At flare point , TECS.h is at -0,2 meters so I wonder what is then the primary altitude source, doesn’t seems to me to be the rangefinder.
TECS.hdem at flare is -4,5 meter, it raise to over 3 meters and command a robust pitch command to 9,8 , since TECS.h is at - 1,4 meters. Not surprising that the plane did not loose anymore altitude, you were lucky that it did not stall.
About the Loter to Alt over shoot I think it is because the plane was not following well the TECS.hdem path and after 30 meters it continues to loose altitude so TECS commands to gain altitude even if the wanted altitude 30 meters has been reached.
It is months that I’m struggling with landing.
IMO one of the problems is that the rangefinder with Arduplane is active (in theory) as primary height source only during LAND mode.
I have written several post on that subject.
My suggestions are
use only LAND_Flare_Alt or LAND_Flare_Sec to engage the flare it will be easier to debug
Improve TECS plane performance
Do not set LAND_Flare_Alt less than 2 meters, try 3 meters, there is a delay after flare start where the AP wait for the motor to go to zero if you are too much low you might crash since the plane will continue to loose altitude.