Hello. I am very new to Mission Planner so I have couple of questions to setup my VTOL aircraft.
Firstly, my project is a tilt rotor quadplane which two front motors are tilting. I use Pixhawk PX4 for this project and I have Turnigy 9x as my transmitter. Up until now I could run my motors and servos with throttle, aileron etc. setup at servo output page. But I couldn’t setup it as a VTOL and I couldn’t run my motors as drone mode.
This is the Pixhawk I am using:
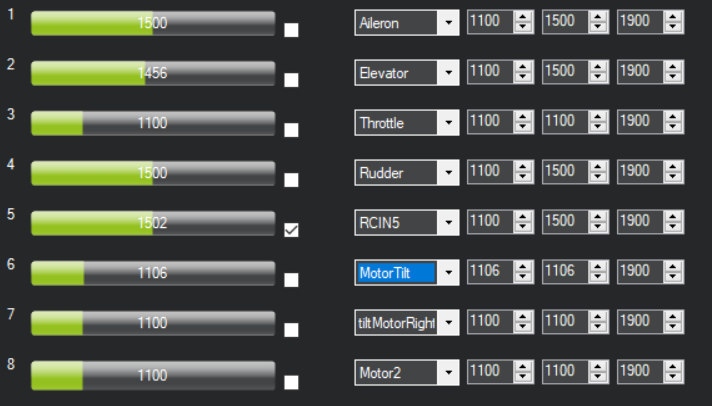
I couldn’t understand where to connect my motors at PixHawk or how I setup channels in servo output page (Shown in above). I tried couple of things but I couldn’t figure it out.
How I setup my tilt rotors servos and what output should I connect at Pixhawk. I could manually control them from Auxillary channel but I couldn’t understand how it works in firmware.
These are the fundamental problems that I stucked and couldn’t move on. I hope I have explained myself clearly. If you help me out I would be very thankfull.
Addition to this I have changed channel 5,6,7,8 as motor 1,2,3,4. When I give throttle only motor 1 and 3 are energized. I couldn’t understand why. According to my logic when I give thrust all motor should be energized and when I give Roll, Yaw , Pitch from transmitter I should get response from these channels. But I can’t see anything.
You are right. Problem was my flight mode. I read about modes and now I can take nice response from motor outputs.
But I couldn’t understand something. When I activate QStabilize or QHOVER mode tilt rotors at 90 degree facing vertically and when I pass to the FBWA mode they go to zero degree and passing to the horizontal flight.
I want to know that for example is it possible for me drive it at 45 degree angle or could I assign the tilt motors to a channel and manually adjust the tilt angle.
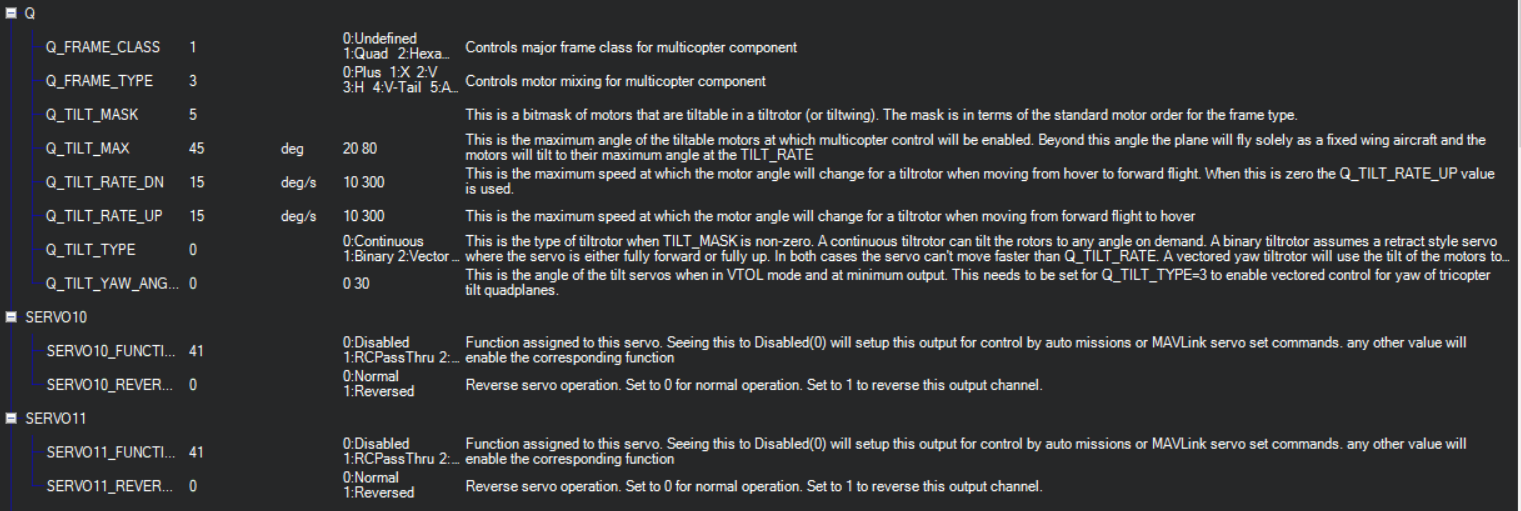
Also I have assigned SERVO10 and 11 to tilt motor but I don’t know which output should I take them from. I tried Aux outs at Pixhawk but I didn’t get any response.
The firmware wants to automatically set the tilt angles of the motors as you described.
I haven’t tried it but I think you could use RCpassthru for manually setting the tilt instead: http://ardupilot.org/plane/docs/channel-output-functions.html
The tilt motor outputs should always be active; not sure why you aren’t seeing them on channels 10,11