We use Pixhawk 2.1 in all of our builds.
I have done a build for cube black.
arduplane.apj (873.7 KB)
Note that this is built on top of master so there my be some other changes if you have been running stable.
Thanks for testing, I look forward to hearing how you get on
1 Like
Hi Peter,
I am running late on my plans due to a series of unexpected events/commitments. If someone else is happy to take over the task of testing it on a quad tilt rotor plane, please feel free. Otherwise, I will test it myself (and provide feedback here) once my existing commitments slackens.
Regards.
With a new design on a Theer Wing frame I was able to finally have somewhat of a successful maiden. Now I just need to play with the Vectored Yaw command volume to keep it from listing/spinning.
@tridge any update on getting the tilt motors to tilt to creep forward while in hover/stabilize modes?
Thanks

Hi, is there an ‘Emergency Motor Stop’ feature for tilt-rotors like there is with copter. This would be very helpful incase of a crash.
its in the works, should be in master in a week or two
1 Like
This is great, thank you Peter.
Here’s a link to my latest tilt rotor build: https://youtu.be/cHCn9pY1x8k
This build was larger than my previous builds and flies really well.
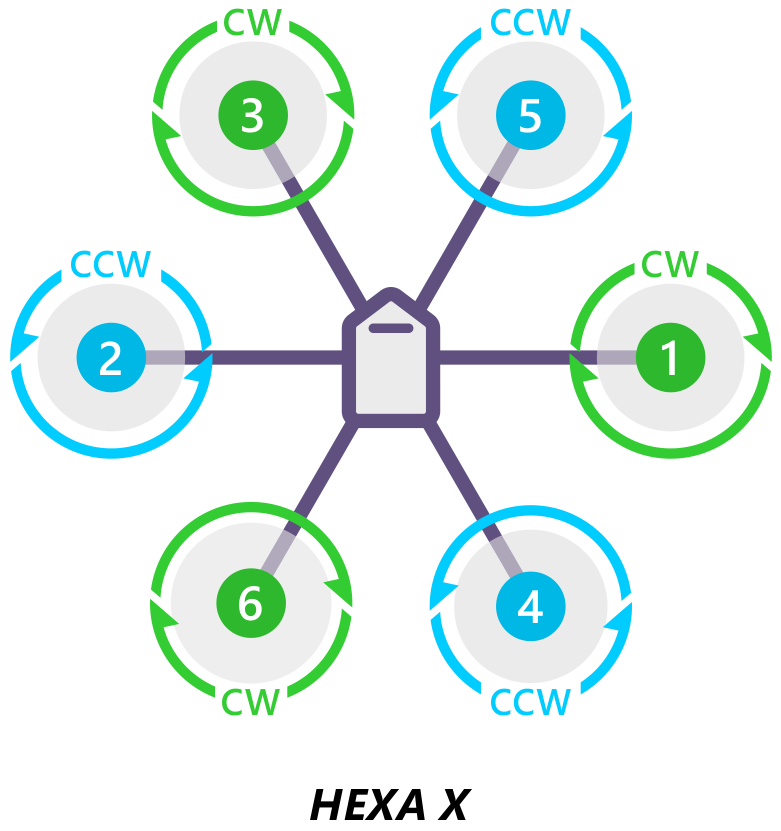
Would it be possible to change the motor spin orientation for the hexacopter tiltrotor?
Rational: I plan to have a winged surface that connects the two middle/outermost tilting props ( motors 1 & 2 ) and noticed that during forward flight the motor spin direction for these motors, in the supported hexacopter configuration, would have the propellers spinning down on top of the wings making the wingtip vortices worse. By having the propellers spinning in the opposite direction, the prop slipstream from motors 1 and 2 would be spinning in the opposite direction of the wingtip vertices ( like in the V-22 osprey ) increasing efficiency, stability and reducing stall speed.
Here is the motor direction diagram of the currently supported hexacopter code:
That would need addition of a new frame type to avoid breaking existing setups.
In case anyone was interested, I was able to make a new hexacopter class by following the instructions in this video. It walks through how to create new motor mixing classes and then how to add these classes to the ardupilot code base. https://www.youtube.com/watch?v=c6aCwSHr_is&t=291s
Hi,
I am interested in trying a octaquad configuration where the back 4 motors tilt and the front four don’t. The tilt rotor documentation has me a little confused about if this would be possible. For example it says in one place that an octaquad is a supported frame type but in another place it does not make the list. Also, the protocol for selecting the motors active in plane mode is setting a bitmask. Could I just add the bitmask for the back 4 motors and expect this to work?
Best,
Alex
yeah, that should work
Thank you! I will try this
Hi Alex, any success in your octaquad rear tilt configuration yet? I am also planning to try it out.
To anyone who would be able to help,
I am trying to simulate a custom frame (Octaquad, X8, rear tilt) in SITL. I’m not exactly sure which files i will need to add/modify. Tracing the code from sim_vehicle.py, i did the following:
- copied the quadplane-tilthvec.parm file and changed Q_FRAME_TYPE, Q_FRAME_CLASS and saved in the same default_params folder
- added the new frame information into vehicleinfo.py in pysim folder, just above “quadplane-tilthvec”
Something still seems to be missing as i am unable to arm throttle (due to all kinds of errors) even though the parameters are exactly the same as the quadplane-tilthvec model.
Could someone offer some guidance to the full procedure of adding a custom frame to simulate in SITL? Thank you so much!
to do custom vehicles with the built in SITL you have to write the physics back-end, much easier to use realflight.
1 Like
so you mean I can’t simulate custom vehicles in SITL just by changing the parameters?
no, the parameters do not give enough information about the vehicle to simulate the physics. As I say realflight is great for this.
I see. I would be interested to write the physics back-end though. I believe it would be a good learning experience. Do you have any advice for this? Are there any guidelines I can find online to aid me?
I would prefer to avoid RealFlight due to the cost.