Thank you Tridge. I have checked this morning and it works if the motors are armed and the throttle is not set to minimum.
I’m using 4 tilt servos. It would be great if I can use vectored yaw with the four motors and I would like to test if it is possible to mount all the propellers rotating in the same direction and hence having only one type of propeller (CW or CCW).
yes, it is a good idea, but it will need a new frame type in AP_Motors, as otherwise it will try to yaw using motor torque, which will go badly and you’ll end up with bad yaw control.
I’ve had requests for a number of varients like this - I just need to work out how to handle them in a nice manner so it works for as many types of aircraft as possible.
Cheers, Tridge
@Ismarg
Hi Isaac
Your design makes me curious, but what are the advantages you expect ?
What do you expect is the advantage of four same rotation direction motors with required vectored yaw control versus common yaw control by different torque ?
What do you expect is the advantage of 4 tiltable motors, if you want to switch off two (rear ?) engines while flying as a plane instead of just tilting two (front?) engines.
Regards Rolf
hi Rolf, I don’t know what Isaac has in mind, but I know some people are experimenting with petrol motor quads, with tilt for yaw. It is easier to get 4 petrol motors to run in the same direction.
For electric, you have a wider range of props to choose from if you don’t need to get both CW and CCW props.
Hi Tridge,
thanks for the information
Make sure that the motors are tilted far enough to reach FBWA_MIN 16 m/s.
Q_TILT_MAX 35 degrees sounds slightly low. But make sure that the motors do not tilt forward too quickly (Q_TILT_RATE_DN) if you need high tilting angle. Set parameter Q_TRANSITION_MS to 0 to get immideatly full throttle authority after minimum airspeed is reached.
Just as a hint: Values of our tri-tilt-VTOL “Mozart”
Q_TILT_MAX 70,
Q_TILT_RATE_DN 10,
Q_TILT_RATE_UP 80
FBWA_MIN = 9
Wish you success
Rolf
1 Like
Hello,
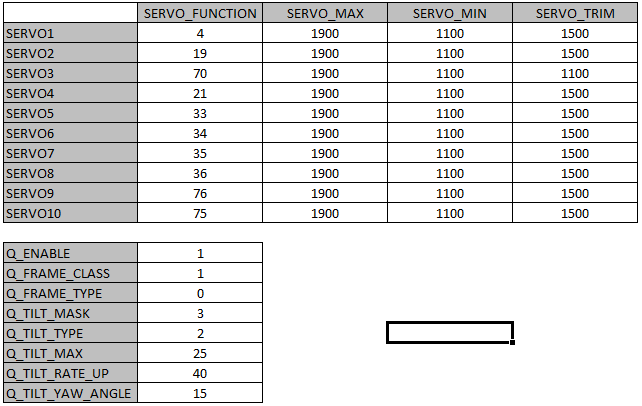
I have just started to play with the tilt rotor image. I am checking the Status screen in Flight Data of MP. The ch1in - ch4in looks working according to the Taranis. The ch1out - ch2out looks also working. However the rest of the servo outputs does not do anything, when I move the quad, or try to control with Taranis. I have set the next parameters:
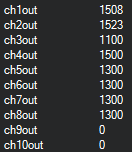
And this is, how to output channels look like:
What do I do wrong? Maybe the missing GPS signal? Or?
Thanks
Laszlo
Hi My name is Jim. I’m a programmer and remote pilot, but I’m new to Ardupilot and I’m configuring an H-quad quadplane with all four props able to tilt forward. The fuselage is a traditional cessna-sort with a high wing and rudder and elevator on the tail. I’ve been reading the documentation and following this discussion, and we’re pretty far along. We’re using 3.8.2-dev, with Pixhawk hardware.
Our flight modes are set up for Manual, QSTABILIZE, and QRTL, and everything’s spinning up and tilting and stabilizing… I’m pretty sure it would fly at this point.
When We’re in in Manual, the props currently tilt forward, and in QSTABILIZE the props tilt up.
What we need to do instead is configure manual control of the tilt. We are using a 3 position switch on the TX that self-centers, and when we push it, we want tilt toward forward flight, but not necessarialy all the way. We want to see how long it takes to get on-wing with the motors tilted forward just 15 degrees for example. When we tilt all the way forward (without changing flight mode) we want it to switch to all four motors obeying the throttle directly. Pulling the switch back would tilt back up to vertical.
How can we configure manual tilt? (regardless of airspeed or flight mode)
Our end goal is to have three flight modes set up with the manual tilt:
-
What we’re calling ‘manual’ mode where we have self-leveling for quad-mode (vertical motor orientation) and full manual with zero self-leveling in plane mode (full forward tilt.)
-
Stabilized flight mode would give us QSTABILIZE for both quad mode and stabilized via control surfaces for plane mode. (bank and pitch angles limited.)
-
An ‘acro’ mode where there’s no stabilization in quad-mode, and (if possible) just a little self-leveling in plane mode, but no bank or pitch angle limits.
Thanks!
I just recognized now, the ESC outputs (5-8) use 400Hz signal. I planned to use this signal for the blade adjustment servos. So probably the servos will not like this signal. Correct? Is it possible to change them to 50Hz?
Thank
Laszlo
Did you read the guide here?
http://ardupilot.org/plane/docs/guide-tilt-rotor.html
If you control tilt completely manually (ie. on a transmitter switch or knob) then ArduPilot won’t know what the tilt is, so it won’t be able to compensate for the tilt.
I’d suggest you setup for QSTABILIZE, QHOVER and FBWA for your first flight. Only use MANUAL mode for ground testing.
that sounds like QSTABILIZE and MANUAL modes, but I really don’t recommend MANUAL mode in fixed wing on a tilt-rotor. That would disable all the safety mechanisms and would also mean it would disable all the transition logic.
you should use FBWA mode for that.
the quadplane code does not support ACRO in hover modes yet. Can you explain a bit about why you want acro? Maybe post a picture of your plane? Very few quadplanes would have the agility to do well in acro.
Cheers, Tridge
Hello Tridge! (I’m a fan since SMB days.)
Thanks for the reply. We’ve done some custom modifications on the PX4 firmware in the past to accomplish these unusual goals, but think the Arduplane’s angular-velocity mechanics are going to give us a better result. We’re simply exploring a case where the remote pilot has more control than usual. One example test we want to do is to tilt forward just 15 degrees, and let the craft accelerate slowly and get on-wing over a longer period of time.
We plan on implementing the manual tilt, and at first we’ll have that mechanism switch between QSTABILIZE and then FBWA for full-forward flight. Longer-term I think it would be cleaner to create a maual-tilt-aware Q_MT_STABILIZE and Q_MT_ACRO, etc… but I’m just starting to explore the scope of that effort.

Acro mode may not make sense in the long term, but the quad pilots in our team always fly in acro mode on our quads, and the advantage is not having to hold the stick forward all the time. We don’t plan on flying up-side-down or anything but just prefer the feel, especially when flying FPV.
My second flight of the FireFLY6 using APM Plane v3.8.2 was as good as the maiden flight. Transitions seemed flawless and I had better turning capability than when using AvA because it can be set to the user’s needs.
I took off and landed in our tiny mowed opening surrounded by hazards. Once airborne, I had a large wild field to fly over. Landing can be tricky when the wind is blowing because the take-off and approach are from the same direction. Other than a little prop turbulence during my descent, the flight was great!
3 Likes
Hello Tridge,
Yesterday I got an idea, how to solve the config problem for my design. Please help me with your comment.
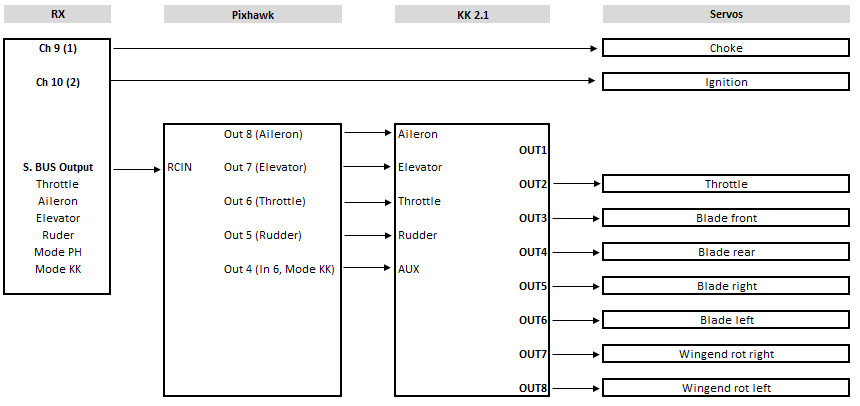
As I have learnt in the last weeks, currently I cannot configure the servo outputs for my special design in PH, but I can configure them in KK2.1 board. I can configure 2 sets with the VTOL KK image. 1 for quad mode, 1 for airplane mode, and it can mix them for the transition mode. I have to change it manually with a TX switch. However the KK board is just a stabilizer, not a robot. So finally I installed PH as normal, without Q functions, but I use the outputs (Ail, Ele, Thr, Rud) as inputs for the KK board. I turned off the sensor mix in KK, it just converts 100% inputs to the right servo outputs. So the KK is just a mixer, every other things are done by PH. It is question, how big is the delay due to this conversation in the KK. The transition mode is also a question. Currently it is totally manual.
This morning I was thinking for. Is it complicate to build this mixer function in PH code?
What is your opinion? Can this system work in the reality?
Thanks
Laszlo
1 Like
First of all this discussion is one of the best I have seen so well done all involved.
Anyways this one is probably for tridge and greg but all suggestions are welcome.
A friend and I have been attempting the CL84 conversion after picking it up cheap at a second hand sale we attended recently and have ran into a few issues. I have one of the original Pixhawks autopilots and my servo mapping is as below. It is based from post #121 by Tridge - http://uav.tridgell.net/CL84/cl84-parameters.parm
- SERVO1 - Front Left Motor
- SERVO2 - Front Right Motor
- SERVO3 - Rear Motor
- SERVO4 - Ailerons
- SERVO5 - Elevator
- SERVO6 - Rudder/Rear Tilt Servo
- SERVO7 - Main Wing Tilt Mechanism
My parameter output can be found here:cl84_params_v2.param (15.9 KB)
My first issue is that the rear tilt servo is not rotating in any flight mode and is shown in the video below. This servo does however rotate if the servo parameter is changed from motor 7 to rudder. https://vimeo.com/240549254
The second issue is that the throttle is stuttering in any fixed wing flight modes. All ESCs have been calibrated and parameters updated in ardupilot. Also this is contradicted in the previous video for all quad plane flight modes where the throttle is smooth. https://vimeo.com/240549868
All hardware is stock form the original CL84 model and has not been replaced. All hardware is fully working when tested via a servo tester.
Has anyone got any smart ideas why these issues are occurring? Or even any ideas on how to debug this set up further? It seems rather odd to me. I do have a pixhawk 2 autopilot and plan to debug further by testing with this more modern version of the autopilot.
Euan
1 Like
Hi Euan,
You need to replace the stock ESCs with multi-rotor capable ones that run on SimonK, BLHeli, etc. This will eliminate the motor stuttering.
I converted my CL-84 back to stock before Tridge finished the code so perhaps he has a .param file you can use. It sounds like there may be a connection change between his previous testing and the Plane v.3.8.2 release.
Good luck!
Hi Euan,
I had a look at your parameters, and they seem OK. There are a couple of odd things like RCMAP_PITCH=5 and RCMAP_YAW=6. Is there some reason you have your radio setup that way? You also have a very different output order to me, but that’s fine as long as it is the way you have it connected.
I don’t get throttle stuttering. Do you have a flight log to share?
I’m using the stock ESCs, motors and props from the kit.
Do you get the stuttering in MANUAL mode? Does it show up in the logs in the RCOU message?
Cheers, Tridge
Hello tridge!!
I was following the tread and was always feeling very step behind what you guys are discussing, developing and improving… I am new with this fascinating subject and I am trying to make a plane with VTOL capabilities (tricopter with two tilting motors for yaw at the front)… fly…
Could you help me to get information to start from step one: how to connect servos and motors to Pixhawk… set parameters, select best (or necessary) flight modes, etc…
Thank you very much!!!
This is pretty well documented on the wiki. I suggested you start by reading it then read this thread from the beginning. Also the Mozzie build is a must read.
Good luck!
1 Like
Thank you David!!
I went thru that wiki but still cannot figure out a wiring diagram and so on for the said tricopter. Same in this thread there are different frames or configurations. I have a simple tricopter flying with APM 2.6 and outputs are 1, 2, 4 and 7(for the tail servo)… Now with Pixhawk + a plane + tricopter with no tilt tail but 2 tilting motors in front instead…I am lost. Any help will be appreciated!!!
I started the Mozzie… it is a beauty!!! Thanks again!!!
1 Like
Hi Juan
Well first up thx for the compliment! ![]()
Maybe it would be best to start with a picture or diagram of what aircraft you are trying to configure? That way we have something to work from.
Regards
Sam