I also seem to remember reading about the airspeed sensor somewhere, so perhaps a next step. I also agree that with a wing config (little vertical stabs) and with my motor spacing being very wide the air frame config is challenging for this setup. By the way my motors are on 6 and 7.
I included a picture here: https://www.dropbox.com/s/kt2xvot7wnirudm/rvvtol.jpg?dl=0
Perhaps I should just get a nimbus or equivalent. I like the tri setup with only having to haul one additional motor as parasitic drag during the fixed wing flight profile (which is 99% of flying time) as opposed to the quad setups with a 5th motor for forward flight. Thanks again
If you look at the tailsitter development page a guy named lorbass had a similar issue I believe. I think what fixed his was that he hadn’t added the wing end tips. his post is close to the end of that blog.
@tridge @Rolf
Hey guys I am back and at it again. 2 issues now…
I gather the forward movement in hover using tilt has been implemented in Q_Vfwd in Loiter only? or maybe not…
Cant seem to get this to work… the tilt servos refuse to tilt forward when i pitch forward or throttle up… so i guess this was never implemented or I’m doing something wrong…?
When i move the roll/pitch stick around alot while in vtol modes it seems to make the yaw til servos jitter a lot… what gives? these should be solid as a rock unless i give yaw input? is this just noise on the servo rail?
the vectored yaw control servo’s still control yaw in FBWA/forward flight which is problem because they are facing 90 degrees forward and now are acting as roll control… how do i turn that off???2018-09-02 15-34-37.param (16.5 KB)
Hi,
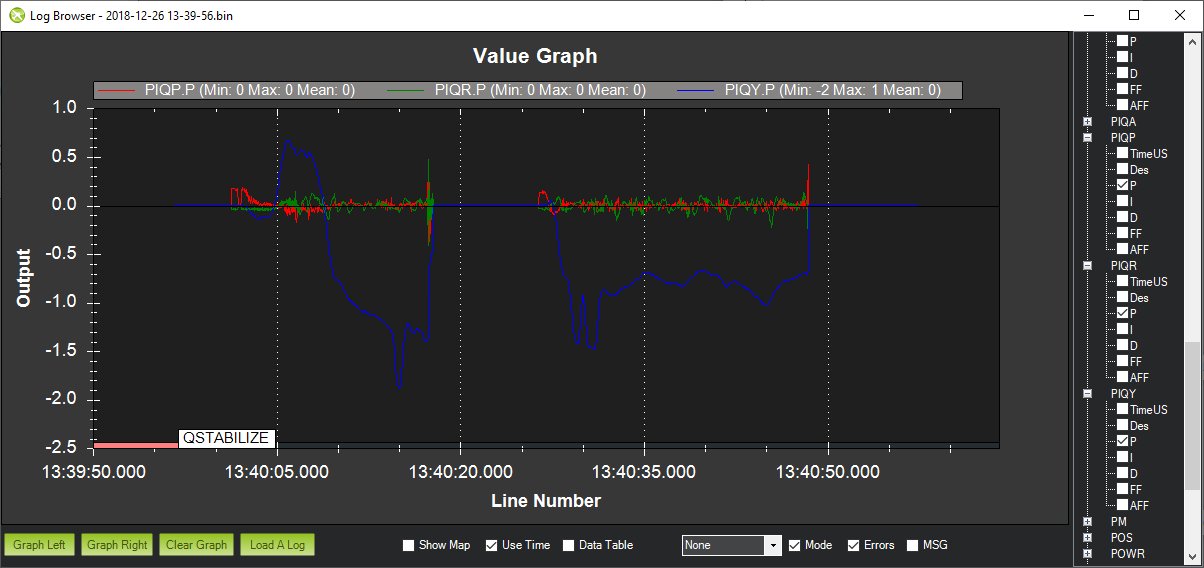
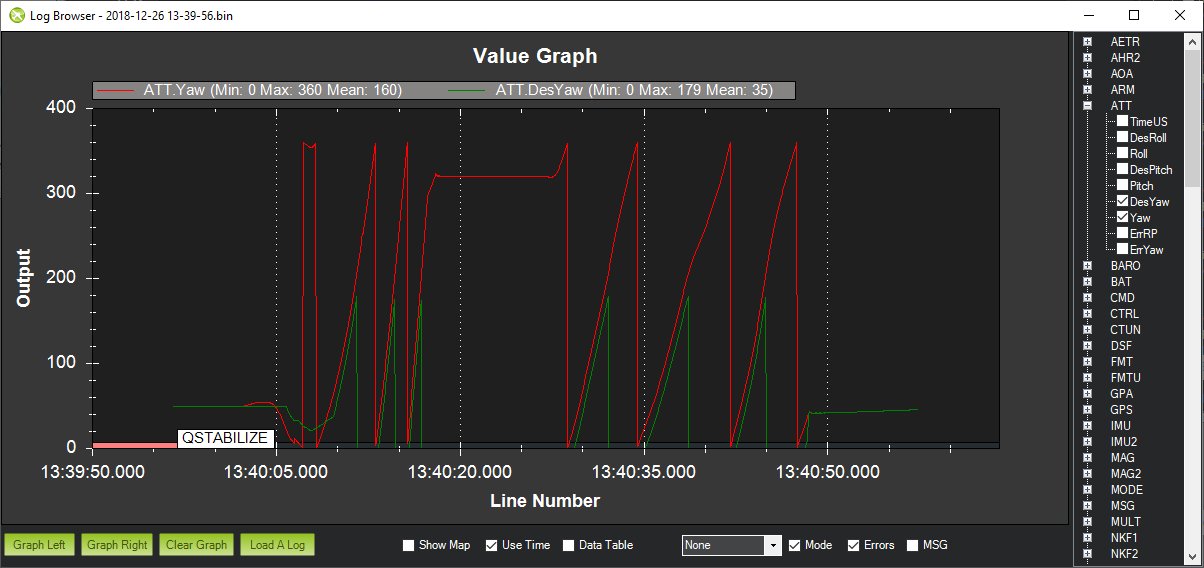
I have a tricopter VTOL set up as below except there is no rear tilt servo to control yaw. Yaw is controlled by motor speed differential. The frame is a FireFLY6 set up as a FireFLY3 with only 3 motors. The plane can hover but continues to yaw in a circle. What would be the parameter to help correct this issue?
The graphs below are from two short hovers in QSTABILIZE mode. Log is here.
Cheers!
Q_FRAME_CLASS,7
Q_FRAME_TYPE,1
Q_TILT_MASK,3
Motor 4 = 36 on Servo 3 = MainOutput3
Motor 1 = 33 on Servo 4 = MainOutput4
Motor 2 = 34 on Servo 5 = MainOutput5

1 Like
Greg, as far as I know tricopters cannot control yaw without a tail servo or tilting front motors. The Y6 is like that specifically to control yaw with torque, with a tri if any motor slows down it tilts in that direction = no yaw control.
I have an old tricopter based on the RCExplorer tricopter and it has to have a tail servo. (https://rcexplorer.se/product/tricopter-v3-kit/)
Hi Graham,
Thanks, that is what I was missing. My only previous tricopters either were a Y6 or had a rear tilt servo.
I’ll probably re-mount the other 3 motors for a Y6 and try it again.
Cheers!
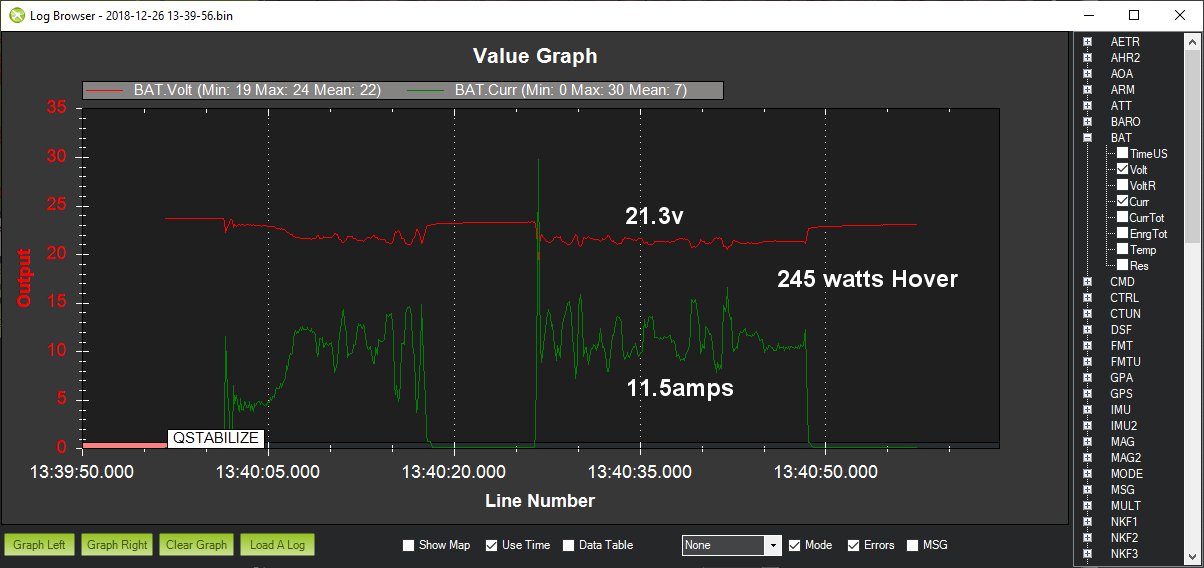
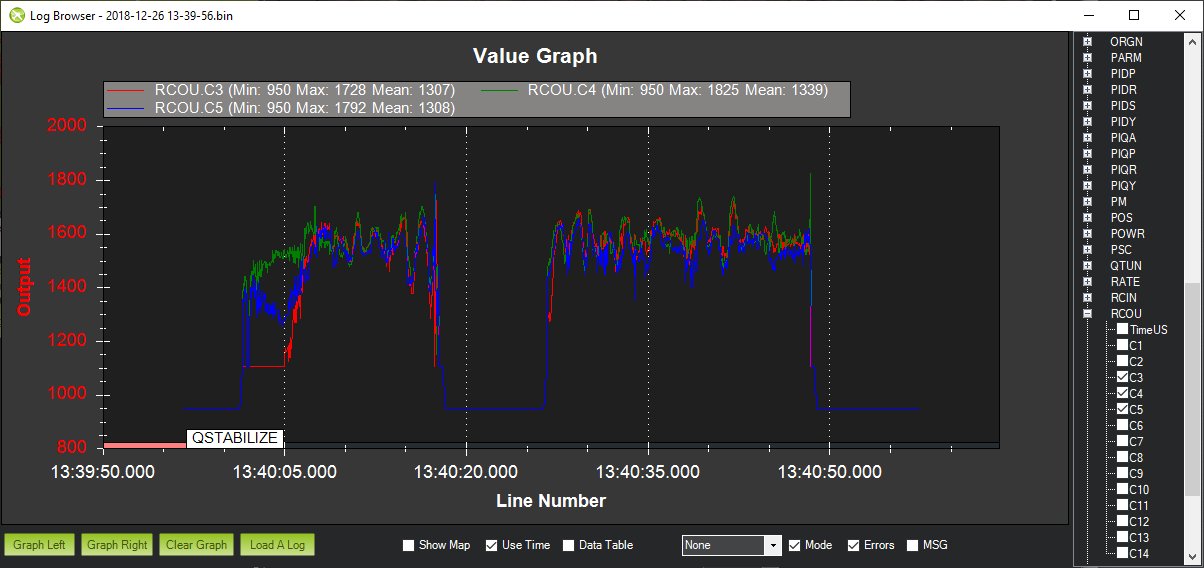
It looks like Hobby King still sells the old Turnigy Talon Tail Servo Mount Set for $10 US so I may have some DIY fun converting the rear motor on the FireFLY6 to swivel. It uses a 10mm carbon bar that I can adapt to the Turnigy 14mm outer tube diameter. The lighter FireFLY3 hovered at only 245 watts so it might be worth continuing my project a bit further. The two short (spinning) hovers below show that my power level was around 1600 pwm or just above half using 10" props. I can always go to 11" props as well.
I had my first successful FireFLY3 hover with yaw control today. I installed the Talon Tail Servo Mount Set and added the Boca Bearing Thrust Bearings upgrade. It seems to work pretty sweet even though it was quite cold and windy in my backyard. I never had a tricopter so it was a fun learning experience for me.
My poor FireFLY6 DIY25 was lost in the woods for weeks last Fall and took quite a beating and soaking. I decided to resurrect it as a VTOL tricopter and it has been great fun so far! The wing ends are grafted RMRC Recruit wing ends and tips. Now I can spend some winter time on the appearance. My other FireFLY6 DIY15 was already converted to APM and still works great. So one is still a Y6 and now I have a Y3…both on APM.


1 Like
Hello everybody,
is it possible to configure the autopilot for a tilt-wing VTOL?
Just like the one from DHL in the picture.
If so can you tell me the param to change?
Thanks, Lorenzo


1 Like
Yes this is a tricoptor with vectored yaw. You set it up as a tilt-rotor quadplane in a tricopter configuration with continuous servos separated for left and right and vectored yaw on.
If you look closely you can see they use and EDF in the tail as the third motor.
2 Likes
Hello guys. I build a VTOL only with 3 motors and no yaw. I’m using pixhawk lite but I’m a beginner in programming and I have some difficulties. I followed both topics and read most of the replies but I don’t know how to set all of those parameters to work.
I’m using the same config from Rolf because my VTOL is the same, I mean configuration.
Blockquote
Hi Juan,
You discribe a tri-motor tiltrotor with vectored yaw, like our “Mozart”.
Here is a setup proposal (see Davids above showed picture - only Servo11/12 function changed due to vectored yaw)
SERVO1_FUNCTION = 4 (Aileron)
SERVO2_FUNCTION = 19 (Elevator)
SERVO3_FUNCTION = 0
SERVO4_FUNCTION = 21 (Rudder)
SERVO5_FUNCTION = 33 (Motor 1 = ESC right motor)
SERVO6_FUNCTION = 34 (Motor 2 = ESC left motor)
SERVO7_FUNCTION = 0
SERVO8_FUNCTION = 36 (Motor 4 = ESC rear motor)
SERVO9_FUNCTION = 0
SERVO10_FUNCTION = 0
SERVO11_FUNCTION = 75 (Motortilt left = left front motor tilt servo)
SERVO12_FUNCTION = 76 (Motortilt right = right front motor tilt servo)
SERVO13_FUNCTION = 0
SERVO14_FUNCTION = 0
Transition related parameters:
Q_TILT_MASK 3 (Only Motor 1 and Motor 2 are tiltable. So the bitmask = binary 11 , decimal 3)
Q_TILT_TYPE 2 (continous tiltservo with vectored yaw)
Q_TRANSITION_MS = 0
Q_ASSIST_SPEED = 0
Depending on your individual plane(Acceleration, Stallspeed) , you will have to adjust the fellowing parameters:
Q_TILT_MAX 70 degree (Max. tilt angel while waiting , that FBWA_MIN will be reached)
Q_TILT_RATE_DN 10 degrees/second hover->forward flight
Q_TILT_RATE_UP 80 degrees/second forward flight>hover
FBWA_MIN = 9 (m/s) (Your Airplan have to reach this airspeed with Q_TILT_MAX ! )
I wish you success
Rolf
Blockquote
The first probleme for the moment is that motor 3 from the rear is doesn’t work and i don’t know why. Can you help me please ?
1 Like
Hi Parfenov,
Try setting Q_FRAME_CLASS to 7 for Tricopter.
Good, thank you. That was the problem but now I have another… at the first test all motors armed and work but after I disconnect the battery motor 1 don’t want to work, even any sound at the connecting the battery. Beside this problem, all motors have lag in throttle and start at a very low rpm and I can’t make a calibration because I have an error in mission planner something with A.C3 3.3+. Thank you for your support and I warn you that I’m a beginner I’ll ask a lot of stupid question :))
No worries about wrong questions. There is plenty to learn!
What modes are you doing the ground testing with? I would recommend using QSTABILIZE and FBWA modes. You can use Manual mode for initial testing of control surfaces but you’ll also want to check the direction of compensation in FWBA mode for ailerons and elevator.
Use the WiKi ESC Calibration procedure to make sure they are set correctly for your setup.
after 1 hour the motors are working ok but when I arm them all motors start at a low rpm… so until now, everything is ok, with the motor. Another problem with servo tilt. I made the tilt mechanism and I have 2 servos with 360degree rotation, I don’t know where to change some values to make a 90 angle. Now are to 80-85, something like that.
EDIT: i found where to change, min and max, but i can’t go more than 2200 pwm and it’s not enough… another solution ?
Use Q_M_SPIN_ARM to adjust motor speed when armed. I typically leave mine at 0.0.
You may be up against the mechanical limit…which should be set prior to installation. On my tilt rotors, I position the servo arm using a servo tester so that I can then fine tune them once installed on the appropriate SERVOx_MIN and MAX. It shouldn’t take you long to correct this mechanical linkage.
Good luck!
Ok, thank you! I’ll try my best and i’ll be back 
Here is a picture with my vtol. Is the second version I hope everything will be ok for the flight. Firstly I want only to fly very well in hover mode and after that to make the transition.

{kind=link}
I like the skids. It sounds like a good plan. Remember to keep pointing the nose into the wind.
Good luck!
Hello guys. I’m back. Thank you, Greg, now it’s ok with arming the motors. Next step I’m trying to set the course of the servo for tilt. You can see in the picture the max course of the servo to the back. I have I problem with the second servo because it can’t make the same course, only a few degrees to the back. Where can I find a parameter to check the tilt? Or how can I make a command to make the tilt to both servos without to change the parameter reverse? I hope you understand.
And the second problem is with motor 3 from the rear. I’m working now in qstabilize mode and after few seconds from the start the rear motor stop.
vtol.param (16.8 KB)
