Hello,
today my quadplane crashed during first test flight. at hover plane hovered good but suddenly happened bad things. Then i switched to FBWA and transition started but front tilt servos didnt complete transition and plane flew at transition while front and rear motors were running. can someone examine why transition didnt complete? and those undesirable turns happened at Qloiter and Qstabilise mode?
FC Cube Orange
Regards.
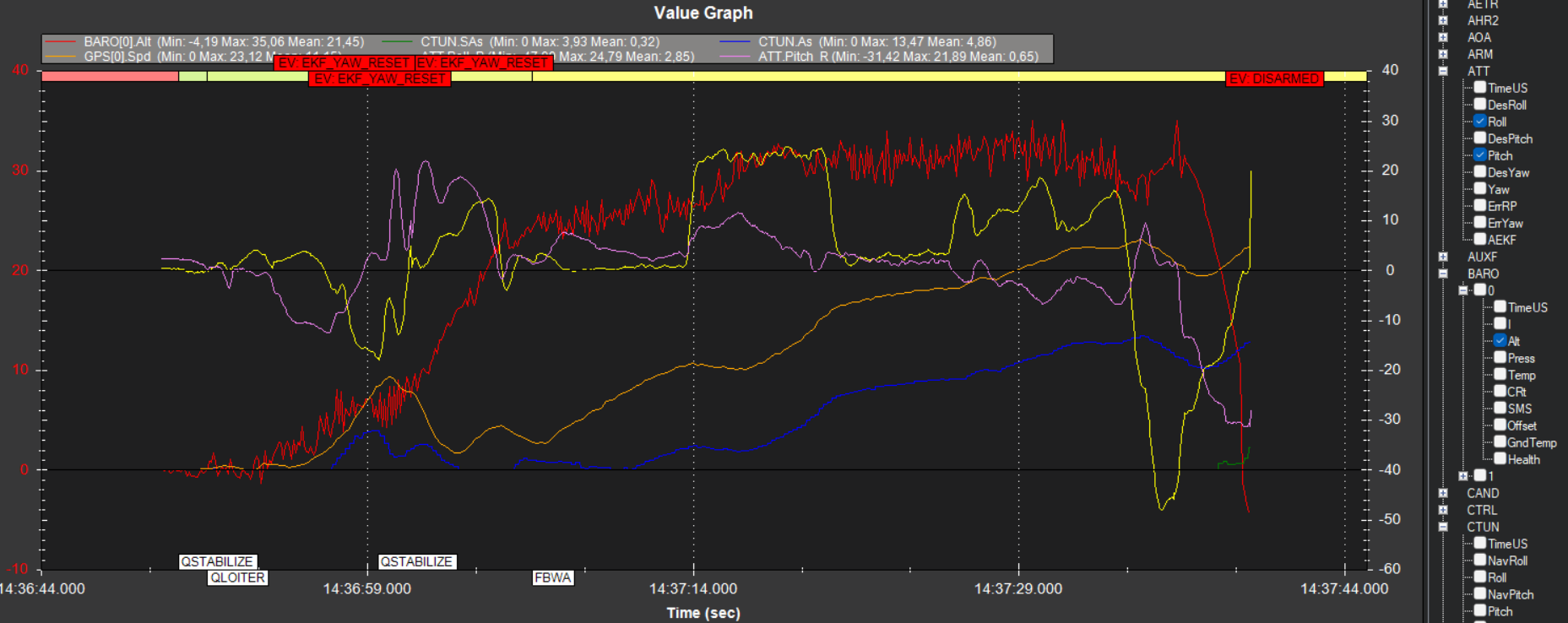
You have not installed an airspeed sensor and the estimated speeds have not reached ARSPD_FBW_MIN at any time. Therefore the airplane waited further for reaching the transition speed.
Did you take off with the wind ? The GPS speed is much higher than the estimated speed. Possibly the crash occurred at the end, when you initiated a too steep turn with incompletely tilted engines and 45° bank angle could not be controlled in this flight phase.
@Rolf Thanks.
We dont have airspeed sensor.
Airspeed sensor is compulsory hardware?
So how we will solve this problem?
Yes There was some wind but not that strong.
From our video we discovered that propeller blew up in the air just before crush.
No, an airspeed sensor is not mandatory for either planes or VTOLs. But for VTOLs I consider it almost indispensable, because the transition works much more reliably, especially after takeoff, when the estimated speed is not yet good. The work with an airspeed sensor in VTOLs pays off in any case.