Well, as part of an attempted UAV Challenge bid which has recently come off the rails, I have been developing a tilt-wing bi-copter with a double-jointed tilt mechanism to allow a larger margin of thrust vector positioning relative to the centre of gravity than conventional tilt-rotor/wing system.
Anyway, after a fair bit of code hacking, C++ learning and quizzing more learned people on here about how things can be done, I finally got an X-plane simulation hovering with a hacked Quadplane SITL.
I’ve got a fair bit more work to do on improving the robustness of the control as well as deal with the transition, but when I get things closer I’ll see if I can find someone to help me push it into the codebase.
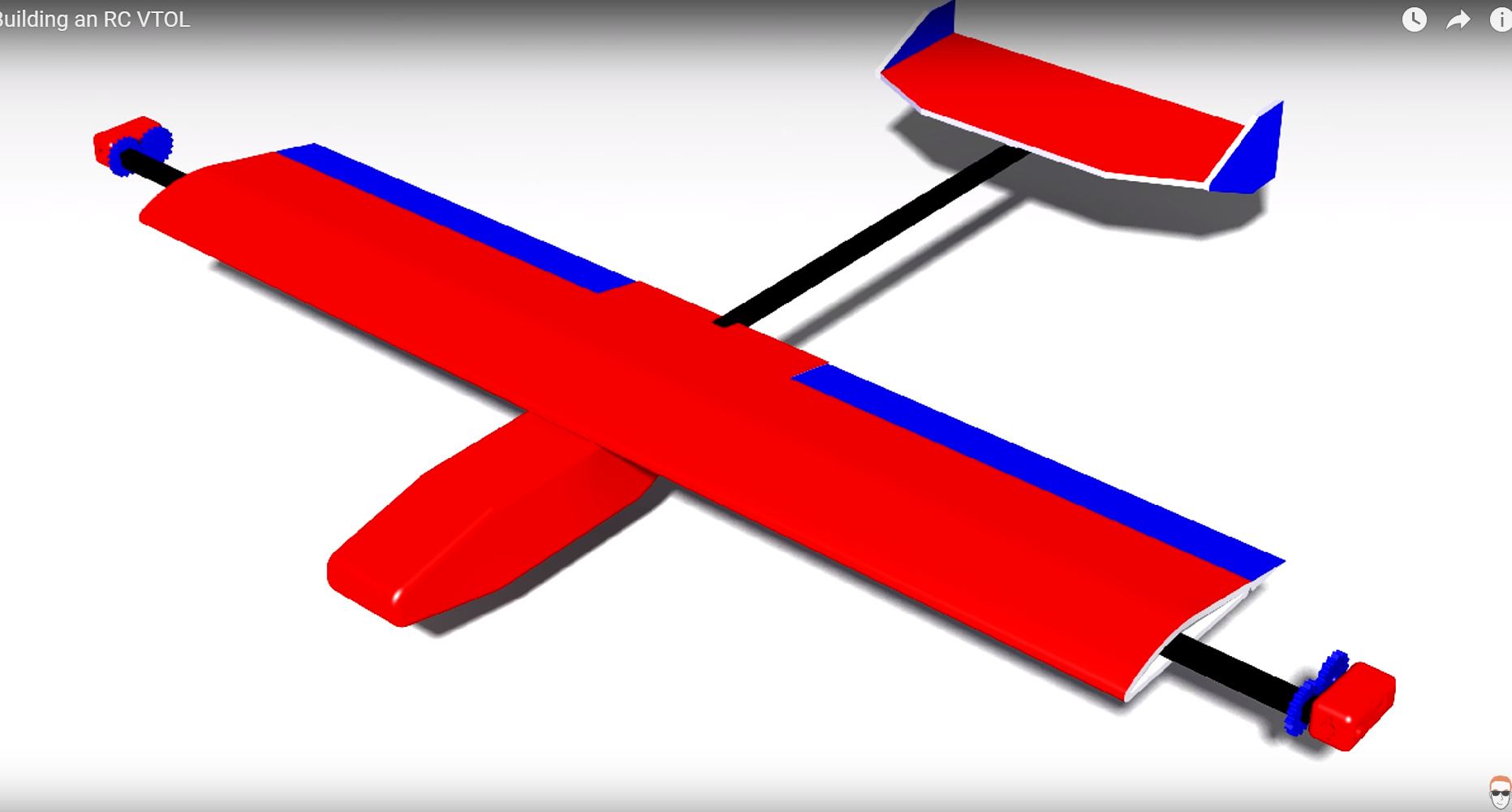
Hey guys, Greg Covey just recommended this thread to me. I’ve been researching on developing a bi-copter that functions similar to the V-22 Osprey. There’s a project I’ve been following in YouTube where someone accomplished a VTOL bi-copter using a simple KK2 board. See link to video and image below. @tridge, I’m hoping you are taking interest in pushing this frame.
Essentially, the motors had independent vectored movement to accomplish yaw and stabilization. From what I’m gathering on this thread, ArduPlane does not have this function yet? Still requires some coding? I’d love to see this frame push forward and become available. I believe I heard PX4 was working on an airframe to this already?
Hi @Alexander_Perez
It’s true that the current codebase doesn’t support this type of airframe and I’m not even sure my mods do either (which I plan to upload somewhere sometime when I pull my finger out)
I am familiar with Tom’s work and it was some inspiration as well as a great example to study. In the end I’m not a huge fan of rhis implementation of VTOL as it will be extremely sensitive to CG position - both vertically and longitudinally. It’s the reason I adopted the double jointed mechanism in my design which is possibly not particularly clear in the video
Hello everyone.
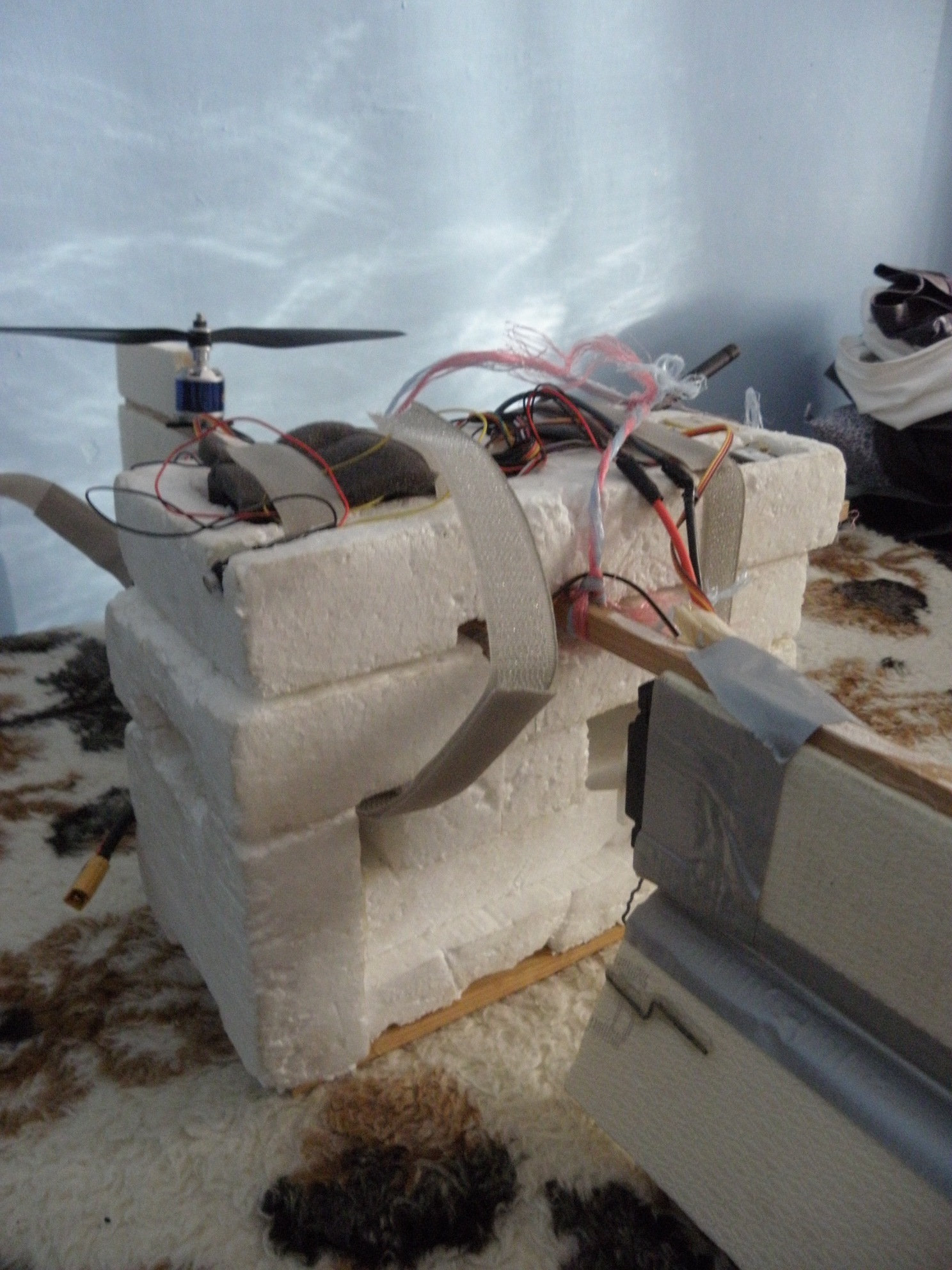
I don’t know if anyone has progressed since last time. I am trying to develop almost the same thing as you do. It is basicaly tilt wing VTOL, with two rotors and wing elevons acting as controls. I just had one flight test with this configuration.
What i did is basicaly Bi-copter only - hovering. Since translation to plane will be much harder.I made entirely new frame for ardupilot. Link to github repo. https://github.com/djumpa/ardupilot If you are interested @tridge. It is not the best code, but it works. Here is video from flight test. https://youtu.be/f9CJkbieDZ0
If you are interested, let me know! I plan to add a tilting mechanism but first i need to test bicopter if it is working as intended. So far it looks promising