Hello all,
I am currently working on a tilt-rotor VTOL QuadPlane having an AUW of 15 lb. (6.8 Kg).
It is set up for vectored yaw using independent tilt servos. It currently uses a large Li-Ion battery to drive the front motors, with a smaller Lipo to power the rears.
I have completed two transition tests, and have successfully executed an autotune in fixed-wing flight.
Now that it is time for refinements, I have been reviewing the logs for feasibility of putting a low discharge-rate battery on the front tilt motors, to take advantage of higher energy density.
In doing so, I found something very alarming - during transition, the plane sends full throttle (1950us) to the front motors, breifly before and after reaching transition airspeed. In my second transition, it hits 90A (the peak for both ESCs at 1950us) for just a split second before ramping down to a throttle value which seems more reasonable - this is illustrated below.
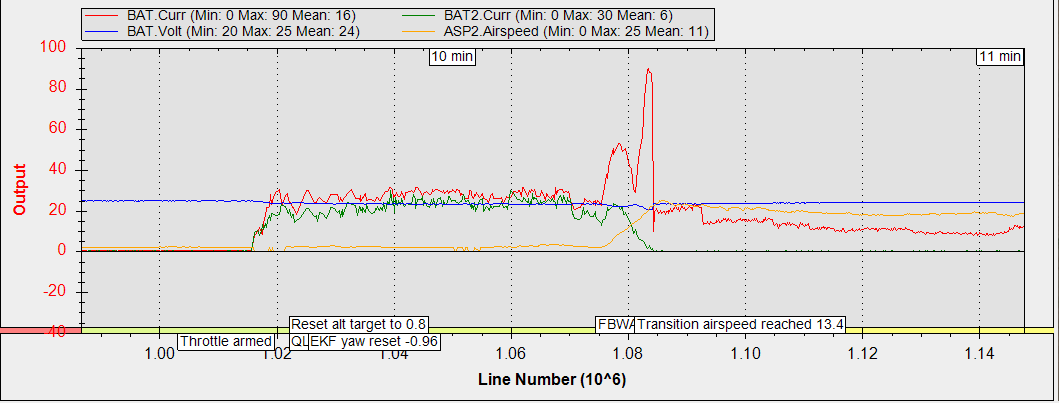
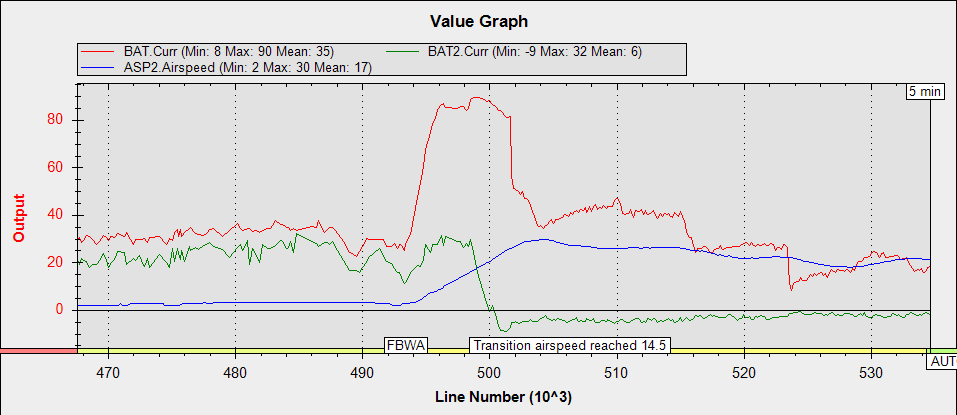
In my first transition test (and autotune) the high power period is considerably longer, beginning before the transition airspeed was met. See below.
I am trying to see if this behavior can be tracked down to a set of parameters or optimizations.
Part of my difficulty is understanding how different parameters for the normal plane code and VTOL parameters interact.
For example, does setting THR_MAX for a tilt-rotor VTOL work as expected, lowering the maximum throttle of the forward motors when in forward flight? When is control of the front motors “handed over” to the fixed wing exclusive parameters? I suspect any such parameters may be overridden by the Q_ subset of parameters, as they would interfere with the motors’ operation during Q modes.
The same question applies to TKOFF_THR_MAX - as it is intended for fixed wing, does it do anything on a VTOL plane where two of the four motors are also the forward motors?
It seems that even setting PWM limits may be overridden by Q_THR_MAX_PWM and Q_M_SPIN_MAX.
I could set up BATT_WATT_MAX or Q_M_BATT_CURR_MAX, but I don’t know how this may interfere with controls, as it limits the power only for half of the plane depending on which power module it’s set for.
Essentially, I am asking if there exists a good way to reduce this “punch -out” throttle during transition. I am perfectly fine with drawing out the transition for a longer duration, if only I could get it to not automatically send 100% throttle to the forward motors.
I have attached the dataflash logs (in .log) for the two transition flights via Google Drive links.
First transition flight and AutoTune
Second transition flight
EDIT: An important note is that these flights had two batteries onboard - the front motors on one LiPo and battery monitor (BAT), the rear motors on a second LiPo and battery monitor (BAT2). I did the tests with LiPo batteries just in case the current was much higher than expected - it is a good thing I did so!