Hello
I am working on a project where we are building a Tilt rotor VTOL. There are total 6 motors. 4 are tilting and 2 non-tilting. There are total 4 servos for aileron and a V tail.
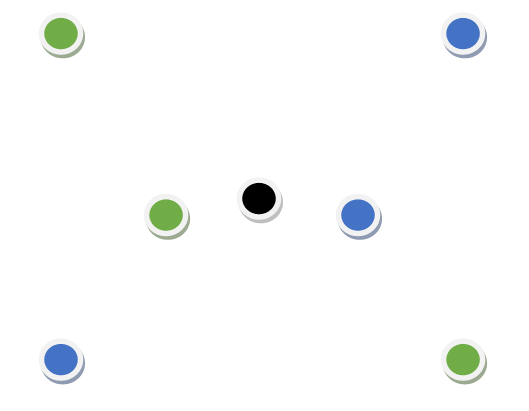
blue are clockwise and green are counter clockwise. black is CG.
1 top right
2 top left
3 bottom left
4 bottom right
5 left to CG
6 right to CG.
the outer motors are symmetric but not at 45° angle from the CG. and two motors near the CG are little behind of CG.
The motors near the CG are smaller compare to the tilting motors and takes only 20% of MTOW while other four take 80% of MTOW.
I am using pixhawk 6C with arduplane C4.3.7 (2d1a8a28) and mission planner 1.3.80.
Could someone please check whether the servo allocation are correct or not?

I used ‘Multi-rotor motor mixing calculator’ website to calculate the motor matrix.
add_motor_raw(AP_MOTORS_MOT_1, -0.999, 0.802, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 1);
add_motor_raw(AP_MOTORS_MOT_2, 1, 0.802, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 2);
add_motor_raw(AP_MOTORS_MOT_3, 1, -0.779, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 3);
add_motor_raw(AP_MOTORS_MOT_4, -0.999, -0.779, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 4);
add_motor_raw(AP_MOTORS_MOT_5 , 0.63, -0.023, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 5);
add_motor_raw(AP_MOTORS_MOT_6, -0.632, -0.023, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 6);
https://github.com/ArduPilot/ardupilot/blob/Plane-4.3/libraries/AP_Motors/AP_MotorsMatrix.cpp [line 500]
add_motor_raw(int8_t motor_num, float roll_fac, float pitch_fac, float yaw_fac, uint8_t testing_order, float throttle_factor)
As you can see, there is no throttle_factor in the code generated by the website.
Should I change to (0.1 and 0.2 at the end of line)
add_motor_raw(AP_MOTORS_MOT_5 , 0.63, -0.023, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 5, 0.1); [small motors (take 10% of MTOW)]
add_motor_raw(AP_MOTORS_MOT_3, 1, -0.779, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 3, 0.2); [big motors (takes 20% of MTOW)]
and should i add this to AP_MotorsMatrix.cpp or AP_MotorsHeli_Quad.cpp?