Sorry no video I was on my own this evening maybe get video tomorrow
Transition both ways was very smooth with no loss in height.
The only thing a will say about the Transition from VTOL to forward flight was in my case takes about 9 seconds and I have a habit of trying to to climb and make a turn too early.
No Autonomous stuff yet.
The next thing a want to work out is the stall speed as I feel my setting of 10m/s is a bit high.
Yes, 9 seconds seems very long.
For me stall speed will be so much higher. Like 14m/s.
I wonder, what propellers are you using and what KV? Also what is you AUW?
You know I have seen a lot of people prop planes with Quad performance (Static trust) in mind which of course is wrong. That is the best props for VTOL mode (low pitch) will be terrible in moving air (fixed wing mode).
EDIT: Ahh, I see some details in your video, all except kv of you motor.
Well 11x4.5 will give you very good efficiency in vtol mode, but they are going to be very inefficient in fixed wing mode. You have to find the sweet spot in-between. I suggest 11x7 for the front (tilt) motors.
I dont know the exact KV, Its about 900 as I got these years ago and they where sitting in a drawer.
To be honest efficency was the last thing on my mind when I designed it. There was a high probability that it ended up as a pile of balsa lying in a field someware.
not just efficency. such low pitch would have a hard time with high speed.
Recomended for fixed wing for pitch speed to be at least twice the stall speed.
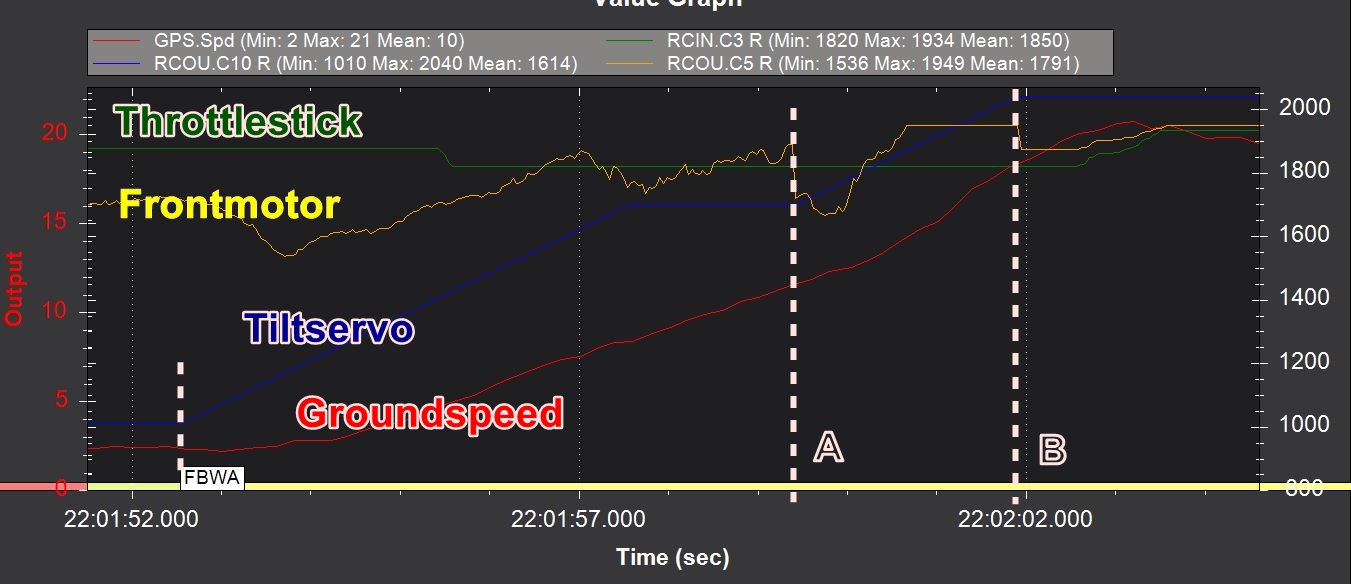
Below is a link to a log of my latest flight I was thinking about increasing the speed of tilt down and min air speed as there is very little delay between the motors reaching 60 degrees and min stall speed and there is a bit of a slightly unstable phase during transition. Could someone explain what is happening with YAW and Desired Yaw
Unfortunately no video as a cant get anyone to do a good enough job of filming it.
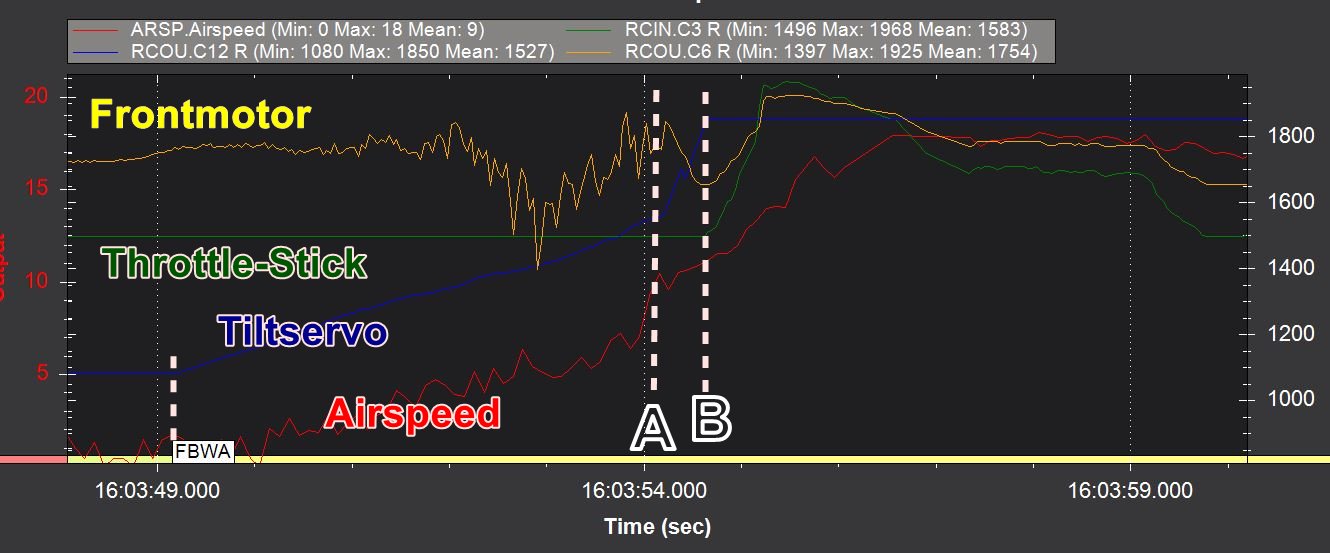
At the time marked A transitionspeed has been reached. Which surprises me is that it takes nearly 3 seconds until the tiltservos are fully retracted (time marked B).
My Tri-Tiltrotor VTOL plane takes less than a second.
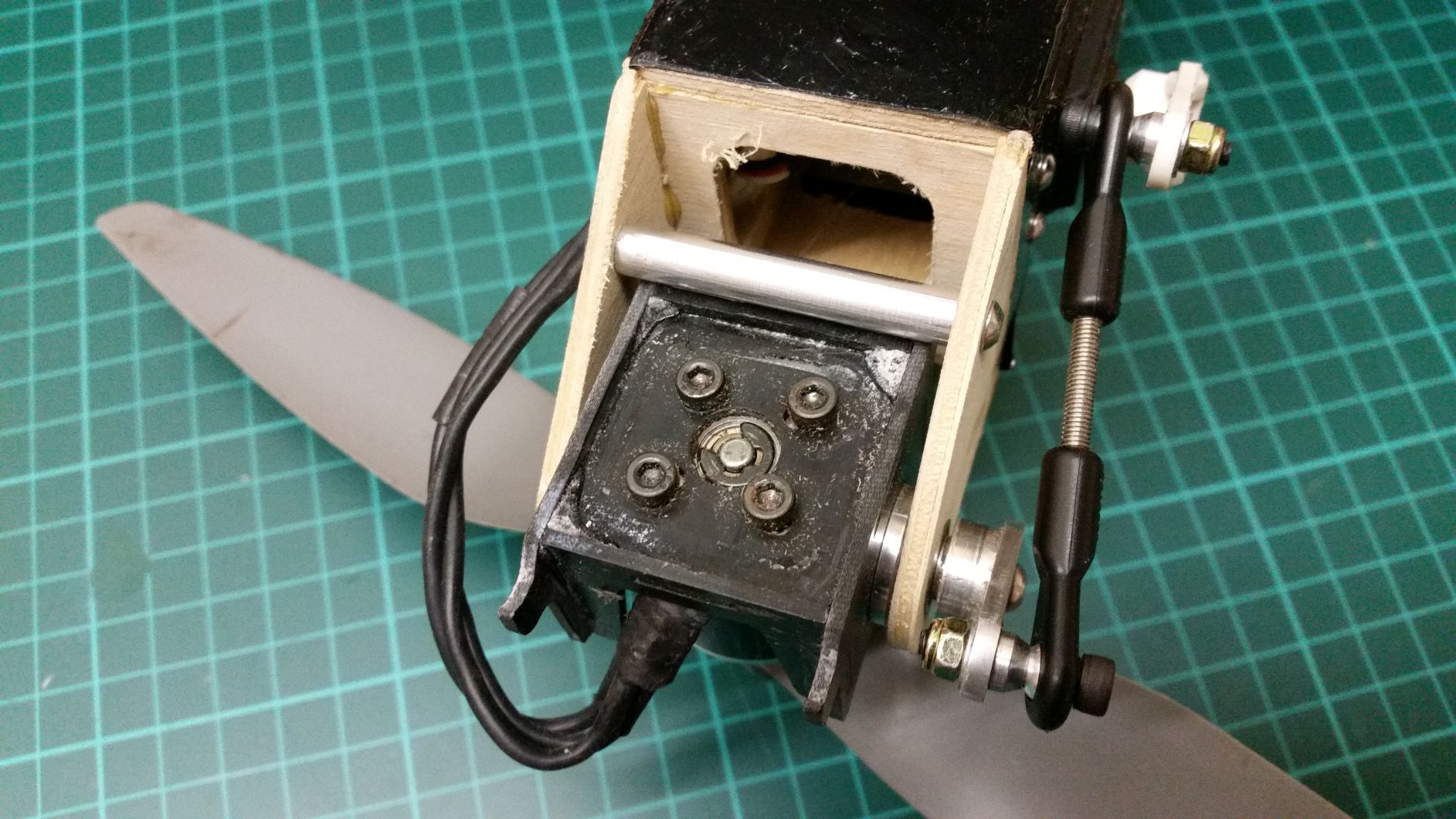
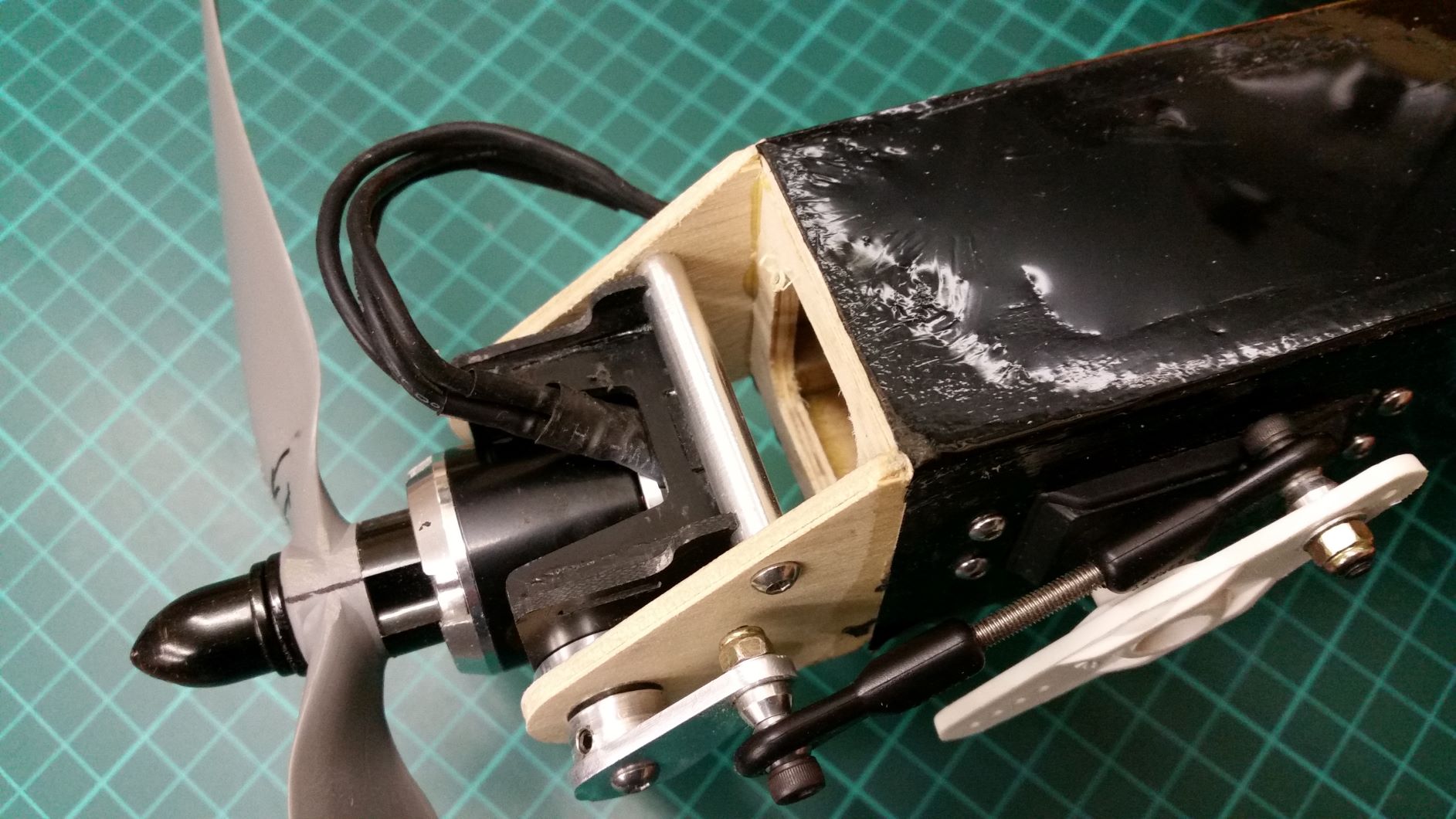
A few weeks ago I had an issue with my quadplane just before the transition one of the front motors started to resonate really badly then there was an awful bang and the motor ended up hanging on the wires. Everything turned out ok and the plane glided down and landed on the runway.
As a result of this near miss i needed to change the motor tilt design to prevent this happening again. What I can up with was to rest the motor mounts on a small bar at either end of the travel.
I am currently working on modeling the transition of my tiltrotor on Simulink but there is something that really confused me and I am hoping that perhaps you could help me out. When I looked at tiltrotor.cpp, it seems like there is a factor called “tilt_compensation” that get multiplied to the throttle. However, as the rotors is tilting down, the factors become really large (~32) and will cause the motors to saturate. Is that a bug or am I having some misunderstanding about the factor?

 固定翼需要大螺距桨:smirk:
固定翼需要大螺距桨:smirk: