Over he last few months months I have been building a quadplane - Tilt Motor version. I have done a successful flight in Qstabalize mode (https://youtu.be/dS3_w6jawXA), Has anyone advice on the best testing method for transition into forward flight.
While testing on the bench I cant get the motors to tilt forward. If i switch to manual should the motors not tilt forward by default as its basically a plane at this point.
Go high, so that you have time to recover in-case anything goes wrong.
Also when doing your first test flight, it is recommend using QHOVER and FBWA only, and setting Q_TILT_RATE_DN and Q_TILT_RATE_UP quite low (say 20 to 30 degrees/second).
That was advice given to me by Tridge.
I was also under the impression, that switching to manual from VTOL mode would perform a immediate tilt forward and not wait for target air speed, as FBWA would. This both for emergency recovery (in-case transition fails and you want to save the plane with a dive in fixed-wing mode), but also how else you would you test forward tilt, apart from manually using servo tester.
Anyway there is a new section for VTOL now, I recommend you post there or ask a mod to move it. Also tilt is special, so might as well mention it in the title, not just quads. Quads are fine in arduplane, but from what I am seeing, tilt is till not too popular and needs experimenting.
Thanks for the tip don’t know min stall speed yet. Going to get a good bit of height hit the switch and see that happens. If I am not happy can always put it in manual and belly land. All going to be interesting
If you set ARSPD_FBW_MIN to for example 10m/s and Q_TILT_MAX to 45 and switch between Q_Stabalize and FBWA on the bench would i be right in thinking the motors should not tilt beyond 45 Degrees
In my case the go the whole way from 0 to 90 Degrees.
Test flight day today and despite all the checks and testing managed to crash it. Accidental hit the switch that changed to manual mode and with amazing speed it did a back flip and landed upside down on the runway. Lesson learned if you have manual make sure the switch is not to accessible. I have it fixed and will make another attempt tomorrow.
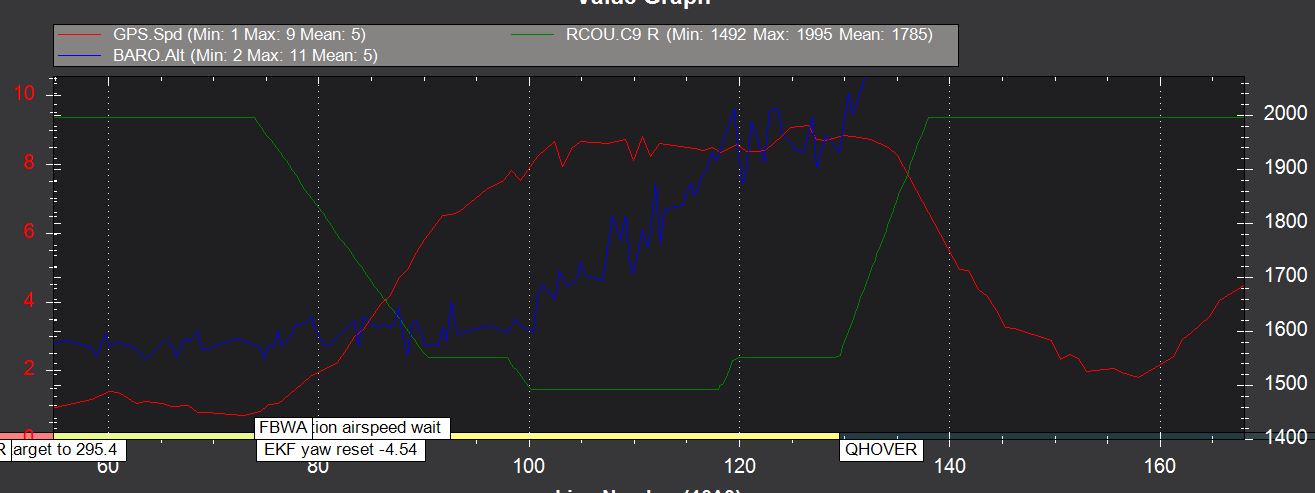
Could someone have a look at logfile below. I did switch into FBWA and everything worked as expected just didn’t ever reach flying speed. On looking at the logs I think it was actually flying but the ARSPD_FBW_MIN was set too high. Should I reduce the ARSPD_FBW_MIN to about 8m/s or maybe Q_TILT_RATE_DN to 8 and reduce the motor angle by a few degrees. As a test flight I was very please as the plane accelerated very smoothly.
Annoying. Also happened to me before. Maybe @Tridge changes the firmware at some point, that you can not switch directly from Q-Mode to MANUAL in Tiltrotor-VTOLS
You have to raise Q_TILT_MAX. 45 is too low. I suggest 60!
Then you pulled up the plane at the transition. This has made it even more difficult to reach the transition speed. I would start the transition higher until you are sure that you will not lose altitude during forwardtransition
Also how was the transition back to VTOL mode, was is smooth or sudden?
Did you loose altitude when transitioning to fixed-wing mode?
Did you try and autonomous transitions (mission)?
Thanks and happy to hear that you already fixed it
Sorry no video I was on my own this evening maybe get video tomorrow
Transition both ways was very smooth with no loss in height.
The only thing a will say about the Transition from VTOL to forward flight was in my case takes about 9 seconds and I have a habit of trying to to climb and make a turn too early.
No Autonomous stuff yet.
The next thing a want to work out is the stall speed as I feel my setting of 10m/s is a bit high.
Yes, 9 seconds seems very long.
For me stall speed will be so much higher. Like 14m/s.
I wonder, what propellers are you using and what KV? Also what is you AUW?
You know I have seen a lot of people prop planes with Quad performance (Static trust) in mind which of course is wrong. That is the best props for VTOL mode (low pitch) will be terrible in moving air (fixed wing mode).
EDIT: Ahh, I see some details in your video, all except kv of you motor.
Well 11x4.5 will give you very good efficiency in vtol mode, but they are going to be very inefficient in fixed wing mode. You have to find the sweet spot in-between. I suggest 11x7 for the front (tilt) motors.