Hello.
When a straight line autopilot mode flight is performed, the aircraft begins to accelerate while leaning.
This is currently corrected manually.
Is there any way to have this corrected automatically?
Best regards.
Hello.
When a straight line autopilot mode flight is performed, the aircraft begins to accelerate while leaning.
This is currently corrected manually.
Is there any way to have this corrected automatically?
Best regards.
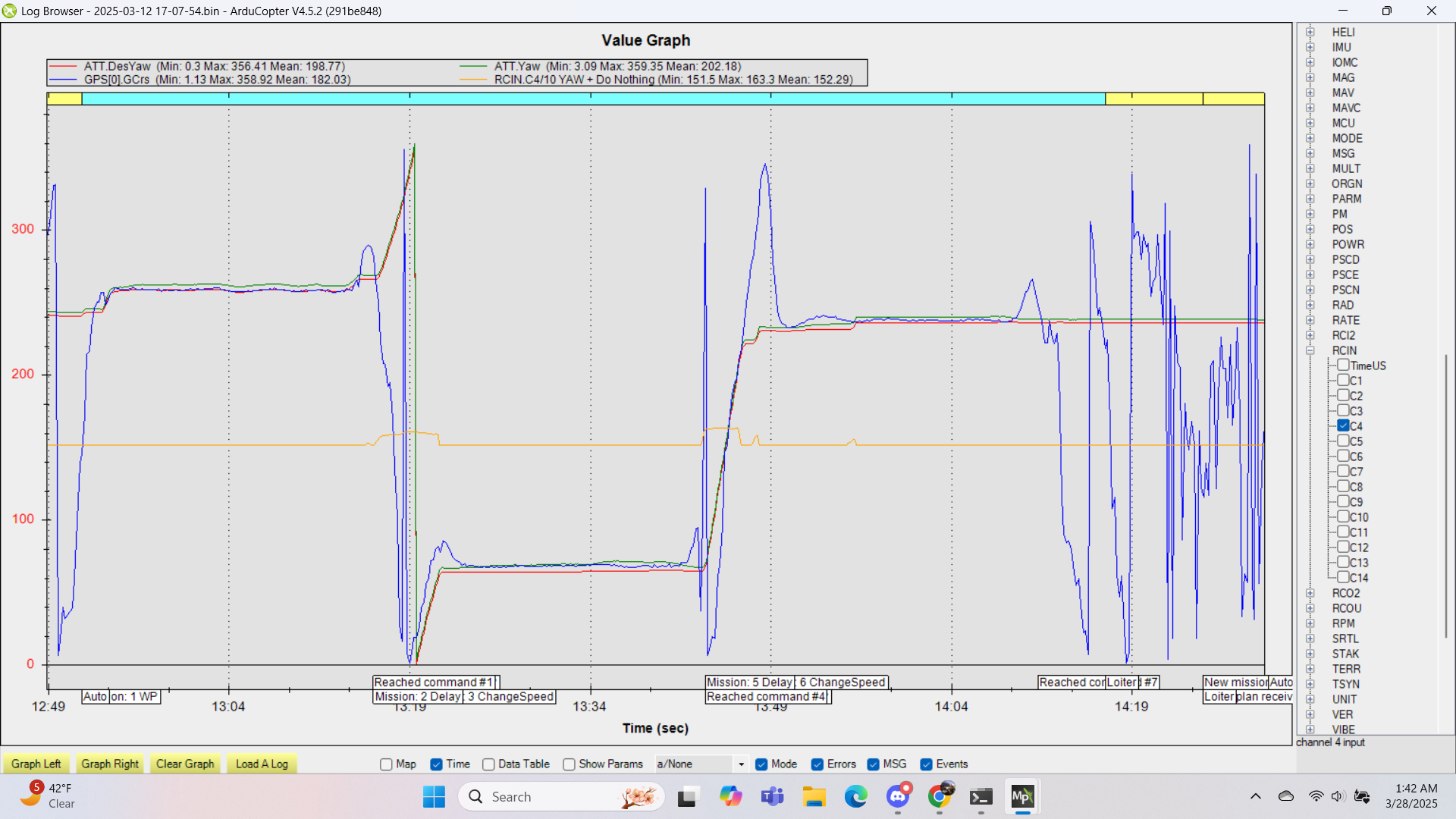
@itagaki-jetset I think this is due to your selection yaw behavior for waypoint navigation (WP_YAW_BEHAVIOR). The default for this is usually 2 which is “face next waypoint except RTL”. You have it set for 3 which is “face along GPS Course”. If you look at the plot, you can see the GPS course seems to be drifting a lot
Set WP_YAW_BEHAVIOR to 1 and it should always face the next waypoint even during RTL.
I looked up the default and it is actually 3 “face along GPS Course”. So you didn’t change it. However I would just set it to 1 and see if the behavior goes away.
Thanks for the reply.
I see that the default setting is to only move between WPs without heading.
Is this setting for the multicopter to take over the settings for the multicopter?
No, the default has the aircraft yaw so that it is pointed into the direction of flight. I’m not sure why your GPS course is varying so much.
I believe multicopters have the same default