I hope someone can help me!
I have a problem on a Hexacopter, in flight after several minutes I get a “potential trust loss” message and then the hexa starts spinning until the ground!
The first three times I was in Yaw autotune and the engine 6 fail. I changed the engine and the esc and the fourth time I was in normal flight and it was engine 1.
I’m posting the logs and two videos where you can see the copter collapsing on the side of the engine in question before it starts to spin.
Unfortunately the fourth time I was not able to land without damage.
Any help would be greatly appreciated!
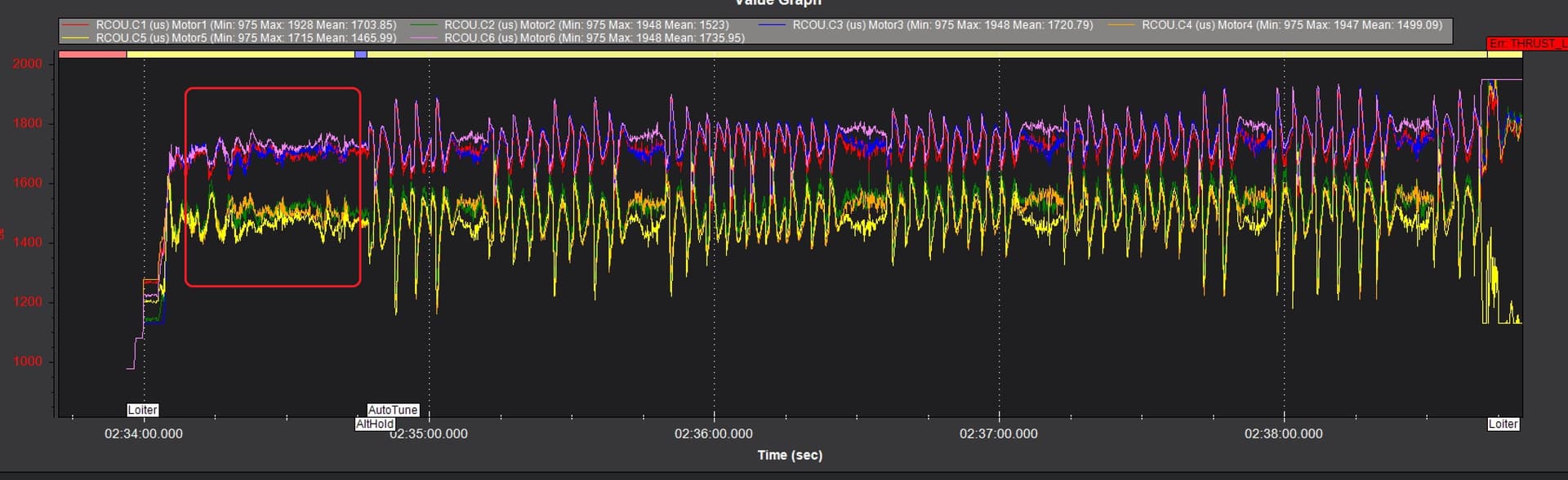
In this log there is a loss of thrust on Motor 6, Motor 5 drops to stabilize and down it goes.
Yes i loss motor 6 and the hexa start to spin but in a realy stable way that i can land without dommage.
These outputs are oscillating badly perhaps the ESC’s are over heating. The CW motors are commanded close to max.
you think oscillating is due to esc overheating? dont you think it’s because i was in autotune?
What can cause CW motors to spin faster than CCW?
I look at the log again and in my last fly i loss motor 1, the hexa start to spin and during my descent i lose motor 6 and crash.
No the opposite cause and effect. I think oscillation is the reason they may be overheating. Oscillation is an indicator of poor tuning. A mechanical yaw bias is usually the reasin for mismatch between CW and CCW. Motors not levels, mounts twisted, arms twisted of frame distorion.