Hi,
I have a dual motor tailsitter without vectored control. I have been conducting VTOL tests and tuning and experienced some unusual behaviour; I had a few flips on takeoff initially, now there is a sudden loss in thrust as soon as the plane takes off to about 1 meter or so. I have checked the logs and cannot point to why there is a sudden loss in thrust. I have conducted about 20 flights and until the last 4 flights I did not have this issue.
If anyone can take a look at the logs and tell me what the problem is, it would be really helpful.
I am using a Cube orange with a mini carrier board.
I have attached the LOG here.
Thank you
Your throttle output (QTUN.ThO) reaches 100% just as you start to lose altitude. Looks like the autopilot wasn’t intentionally descending at all. I would suspect therefore an issue with one or both motor/escs
Note that both your motors are being commanded to under 70% at peak altitude error. I don’t think this is an ESC issue. Additionally there’s a “normal” amount of voltage drop the whole time so if it’s a wiring issue, it’s not obvious.
I suggest trying a non-position mode like QSTABILIZE to simplify the problem. It’s better practice on takeoff anyway - GPS error while on the ground can cause the craft to try making lateral moves with no altitude.
(EDIT): Noticed the Q_M_THST_HOVER is only 0.36! You do have hover learn-and-save enabled (Q_M_HOVER_LEARN=2), so if you spend a little time manually hovering, your problem may sort itself out.
I have checked for the connections, calibrated the radio and ESCs and ran the motors on the ground. In manual mode they work fine, in any Q modes the throttle doesn’t increase constantly, I suspect that is a problem because I’m running it without props.
Thanks I will try hovering in QSTABILIZE. I did check the Q_M_THST_HOVER parameter, but I assumed 0.36 was a descent value as this is the first time trying with a VTOL bicopter. Usually maintain 0.25 with quads.
Hey guys, I managed to do a few more hover tests. Increased the Q_M_THST_HOVER to 0.55 before the flight and the hover seemed to work fine for a while. However, after a few flights, the thrust hover changed to around 0.45. Also after a few flights, there is still loss of thrust, which I am guessing is due to the high voltage sag.
Here are the LOGS for the flight, do let me know your observations.
I have another issue related to the vehicle leaning on the pitch axis and unable to recover after hovering for a couple of minutes. This happens every few flights and usually ends up in a bad crash. The tune doesn’t seem too bad and I’m not sure where the problem is, the control surfaces are pretty large, almost a third of the wing, which I believe should be plenty to recover. I will start a different discussion if this is too out of topic. Here is the LOG of one such crash from yesterday.
It would be helpful if anyone had insights as to why this is happening.
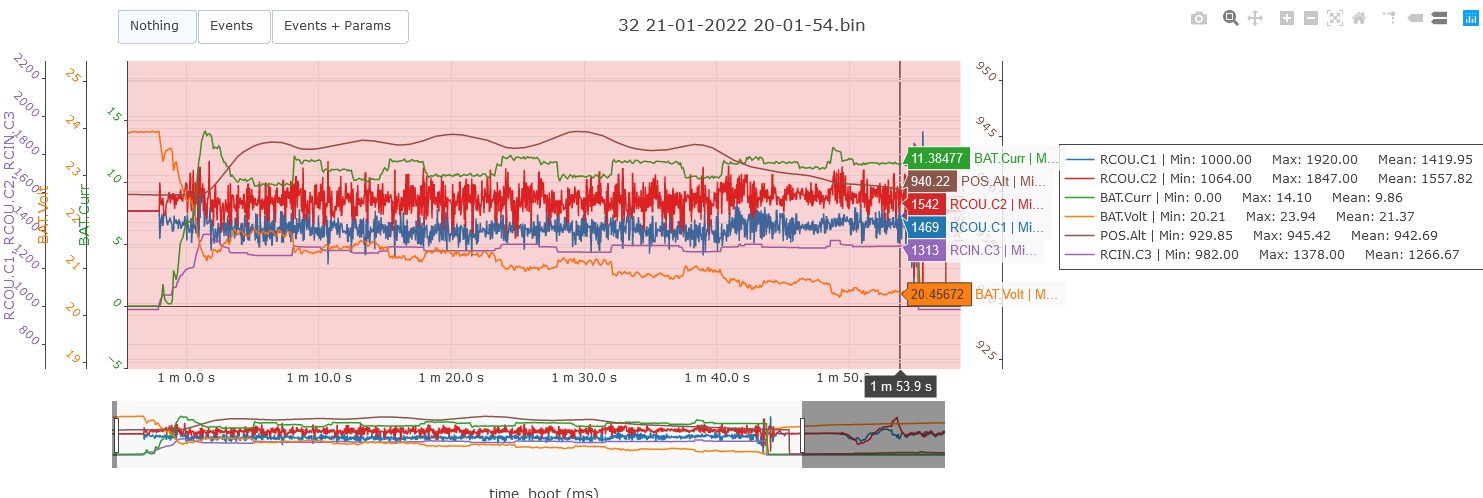
Brown line is altitude, orange is voltage. Just look at that voltage sag! You lose over 3 volts.
You have your battery voltage compensation set to taper off at 21v. So once your battery sags beyond this, you start losing thrust. (Q_M_BAT_VOLT_MIN = 21)
The docs suggest using 3.3v per cell for this value - so for 6s, it should be Q_M_BAT_VOLT_MIN = 19.8 .
If you intend to hover for long periods of time, consider using a higher C rate battery.
The ESR seems to be around 200mΩ total, or 33mΩ/cell. Without knowing the battery capacity and C rating I cannot say what this means for you, but if this were a typical race quad battery, it would be time to retire it.
Hello again,
Thanks for the input. I am currently using a 6s2p Li ion battery pack.
6Ah capacity. Not completely sure about the C rating but I believe it has a max current output of 40A. The current draw during hover is around 10 to 12 A. The voltage sag does seem like a lot.
I will certainly change the Q_M_BAT_VOLT_MIN to 19.8 and try flying.
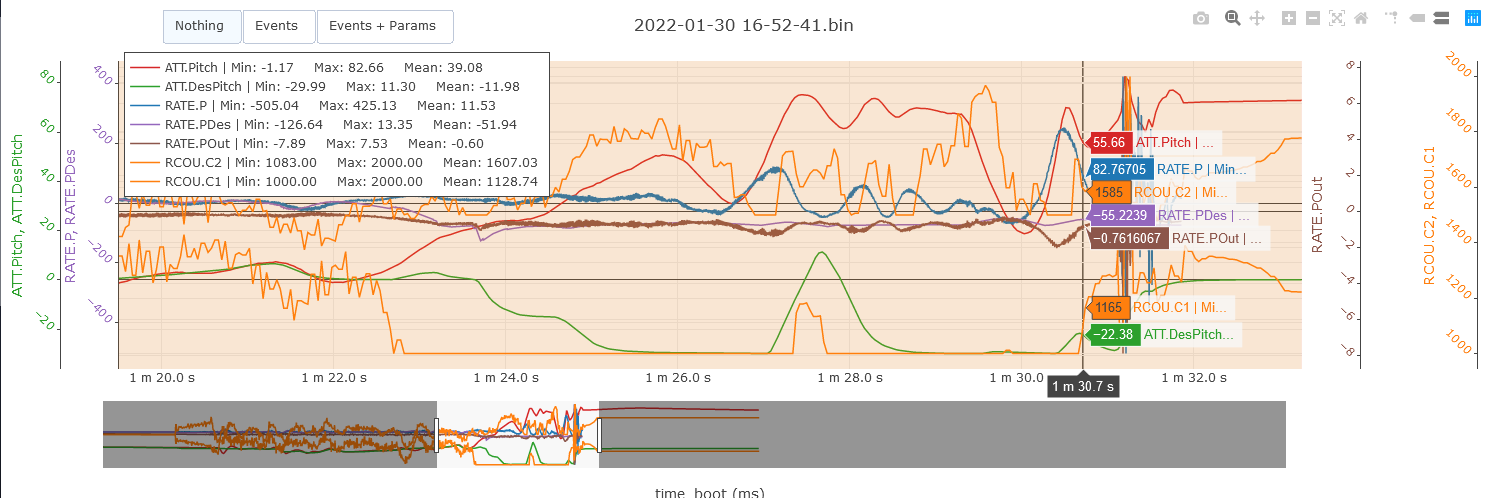
Your right elevon (servo1) is saturating. I’m surprised you didn’t completely lose control!
You may need to increase control throw or move your center of gravity backwards.
I don’t know what your airframe looks like but it may not like doing a transition upside down. Generally tailsitters will be happier with the belly of the aircraft into the wind, so that angle of attack is positive.