Ok, went back to .06 and .03 for MOT_SPIN_MIN and MOT_SPIN_ARM because that seemed to work once. Definitely unrelated; I crashed during stabilize this time. So it’s not autotune and not the parameters above. I wish it were specific to autotune, in which case I could resort to manual tune, but this morning ruined that notion. I think this was the first time it happened aside from autotune because I hadn’t been sufficiently aggressive with it until this morning.
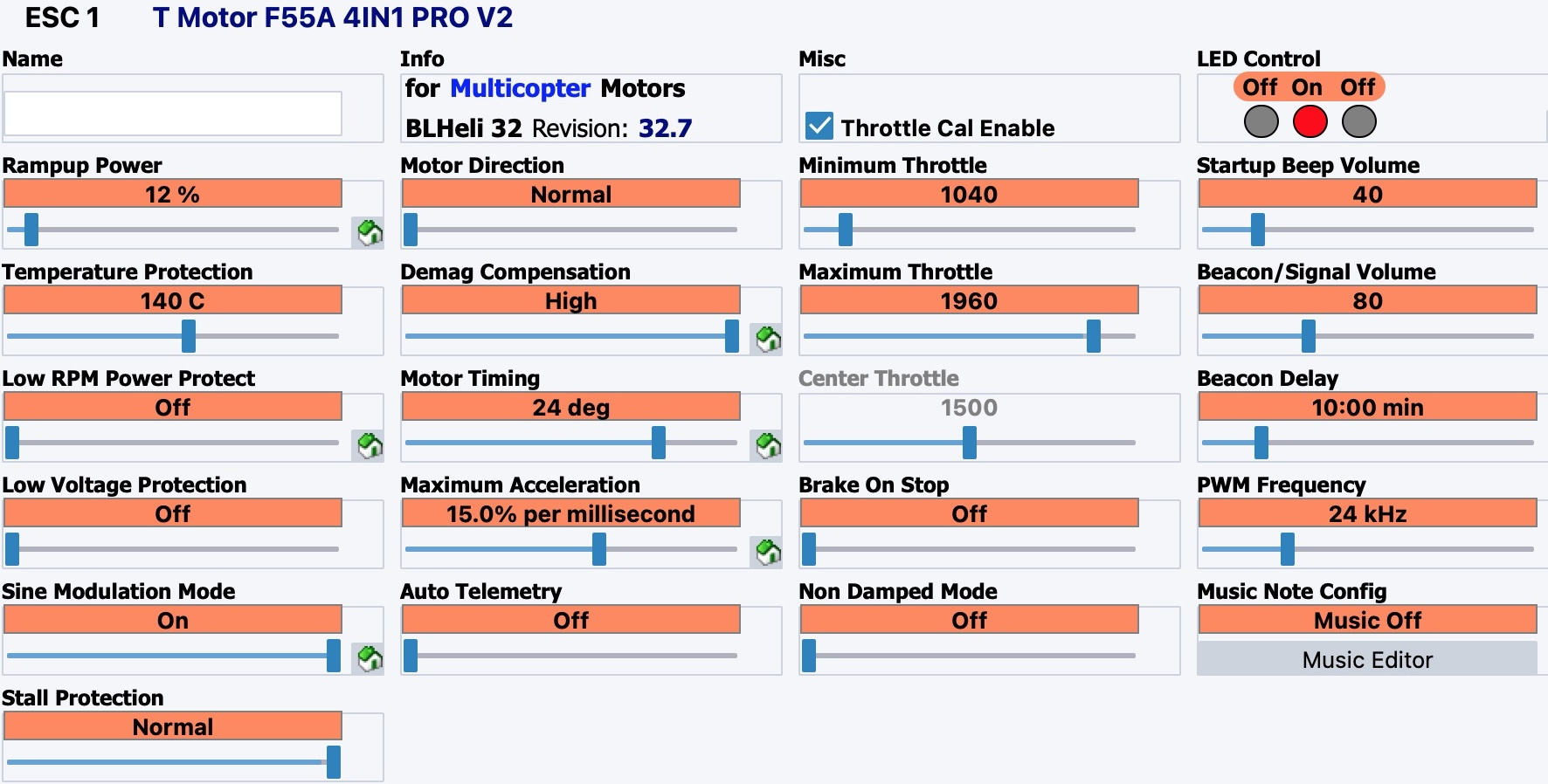
I wouldn’t know what a desync looks like… doesn’t that occur at high rpm rather than low? What can I do to diagnose desync? Should I fix the motor timing at a specific number, for testing purposes, instead of using auto? Try 20 degree? The default was 16, and now that it’s on auto I don’t know what it was using. I’m grasping at straws now.
Could this be intermittent motor wiring? These particular t-motors comes with short wires that are solid conductor 20awg (or else so tinned it might as well be solid), so they don’t give the warm fuzzies regarding the soldered mechanical joint. These are the least ideal wiring I’ve encountered. I may re-do them with small crimp connectors, maybe also filled with solder, as that actually seems like it might be mechanically superior to soldering alone in this case. But I’m skeptical that this is the problem—I would expect motor failures more randomly. What symptoms should I expect if it were a crappy motor connection?
I’ve got my motor wires twisted nicely all the way back to the ESC. This is the first time I’ve done that, am I changing the inductance enough to affect motor sync?
My failures are very specific to attitude stability, and it seems to occur when one motor (though not necessarily the same one) tries to recover from low rpms. It seems like a motor cutting out when attitude recovery should be occurring—it doesn’t try to wind up and then fail to stabilize, it just seems to… give up. I will try to get a decent video of it, if anyone thinks that would help.
Also, @dkemxr I will try the lipo instead of li-ion, I have one available and I want to do a video of the problem anyway so it’s an easy test. Maybe the two 4000mah li-ion in parallel can’t source the recovery current fast enough, though that seems unlikely.
One other thing to throw into the mix—the arms on this are longer than they need to be. I sized them to be able to fit 18” and I’m flying 15”. Generally I would think this increases stability, but it does also add increase the moment which presents greater resistance to rotational acceleration—thereby loading the motor more for the same rotation than if I had shorter arms. It’s easy enough to shorten the arms, but I thought I was doing myself a favor. With the longer arms I can swap out the motors and put 18” on there if I want to carry more weight someday in the future, but if I cut the arms I lose that option. But if the consensus is that my arm length is a problem, I’ll definitely chop them