Was in the middle of autotune, when my quad suddenly lost altitude and returned the thrust loss check error.
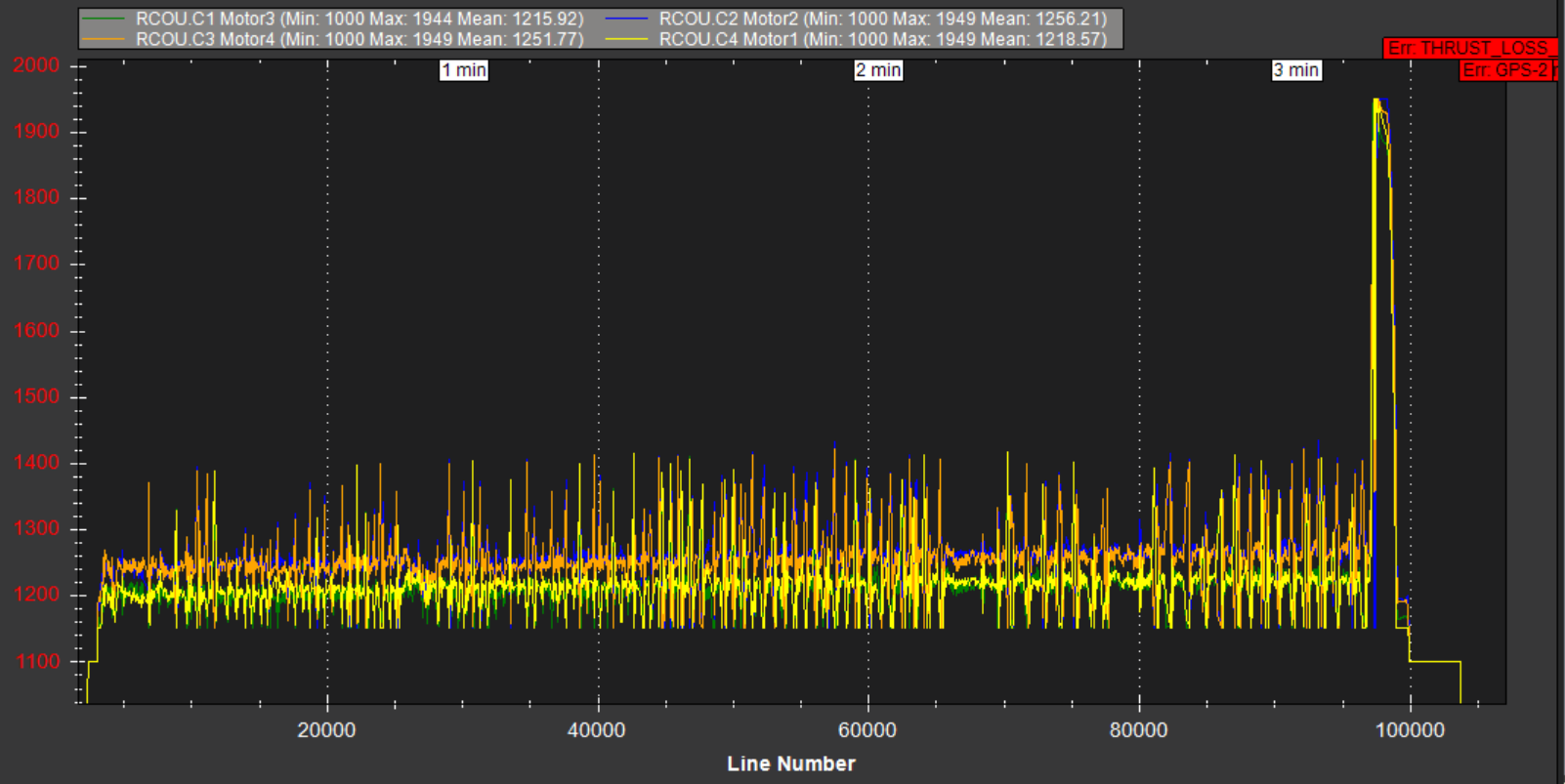
RCOU definitely shows some yaw bias (but doesn’t look too bad, off by ~30 pwm). Right before the thrust loss, RCOU1-4 maxes out and it’s not super clear to me why.
Looks like all ESCs lost sync or shut down. Current dropped off to nothing at the same time.
Ensure you disable their low voltage cutoff.
It could even have been your battery connector overheating and losing contact, there’s multiple things to check.
Also set:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,3
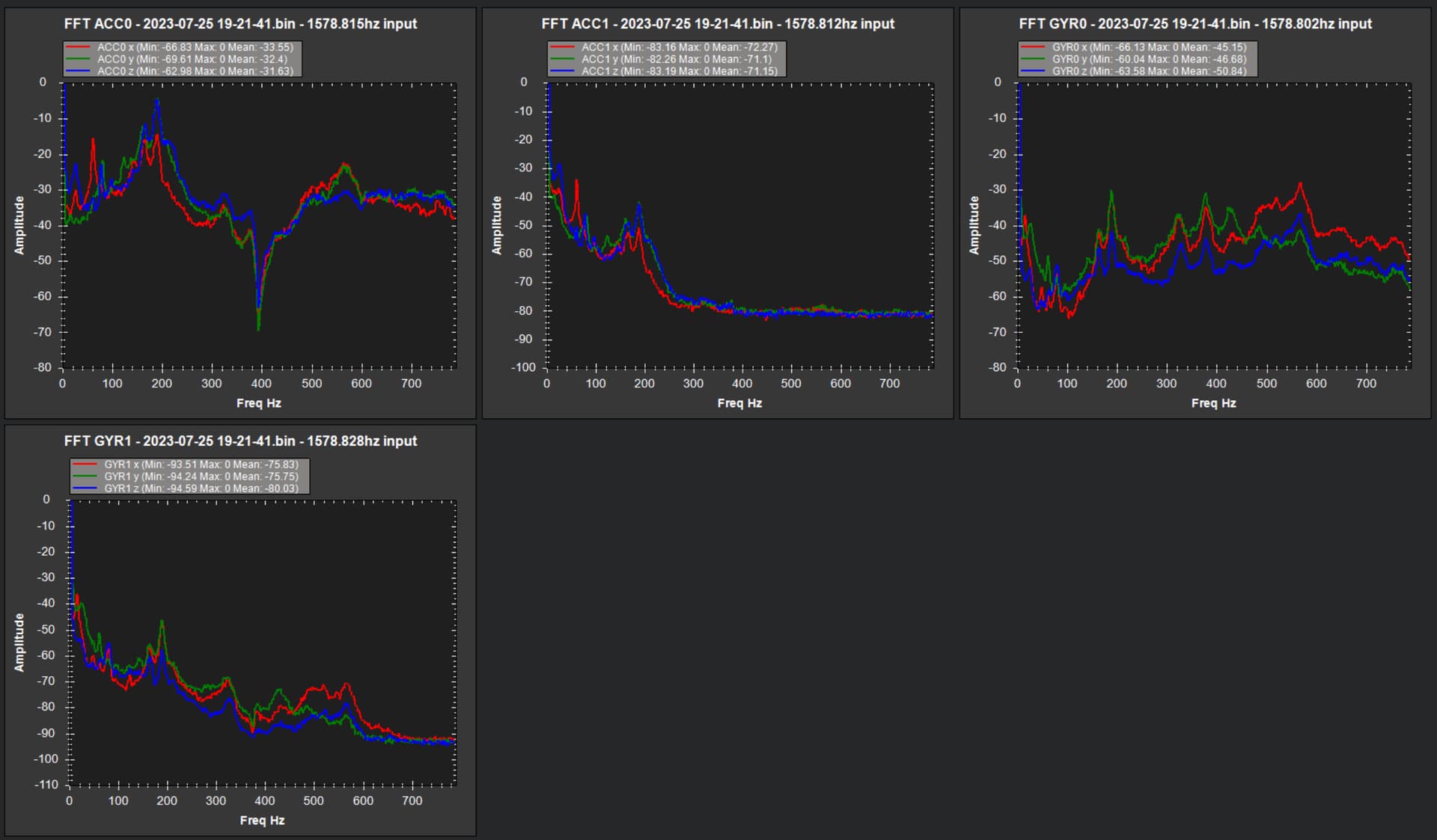
and your harmonic notch filter is not working properly. At least set these but we would need to see a non-Autotune log to verify operation:
INS_ACCEL_FILTER,10
INS_HNTCH_REF,0.11
INS_HNTCH_FM_RAT,0.7
Thanks for the feedback. Where is the low voltage cutoff for the ESCs set - would this be on ardupilot or Blheli32?
The battery connector visually looks healthy.
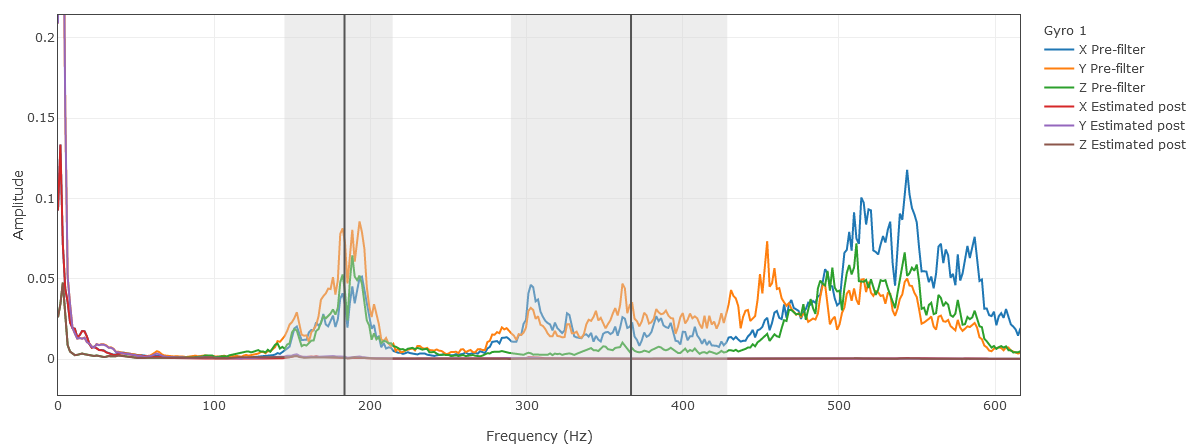
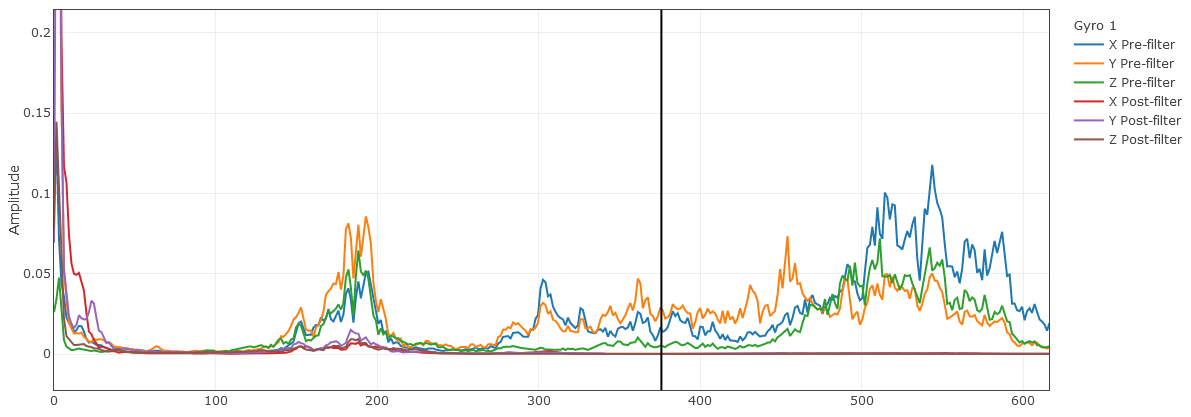
Can you elaborate on the harmonic notch filter? Looks like some of the peaks are still present on the post-filtering, but they are attenuated compared to pre filter.
Low Voltage Protection = OFF (rely on the flight controller battery settings)
Temperature Protection = 90
Motor Timing = Auto
Low RPM PowerProtect is important with bigger props and motors, but may be OK left ON with yours. It certainly wont hurt to be OFF.
You could probably change to using DSHOT600 too and make use of the Telem wire between the ESCs and flight controller for all the nice BLHELI data like RPM and temperature and so on.
I had checked your HNOTCH settings and data and it wasnt working correctly. Use the settings I gave, but it would help to see a flight .bin log without Autotune in it.
The general attenuation comes from the INS_GYRO_FILTER value, attenuating everything above that frequency, but it’s not so targeted.
That log is barely useful since there is no stable hover.
Judging by this log alone, you will need to set your hover throttle manually since it is so low it wont learn.
MOT_THST_HOVER,0.04
MOT_HOVER_LEARN,0
and you may have to check and reset MOT_SPIN_ARM and MOT_SPIN_MIN.
You would benefit greatly from setting up DSHOT and the BLHELI telemetry data (ESC RPM) and setting the harmonic notch filter to use that data on a per-motor basis. Once you’ve got ESC data working you can change to these settings and the harmonic notch should just work: