I am hoping someone could help me out. A couple of weeks ago, I received the following error:
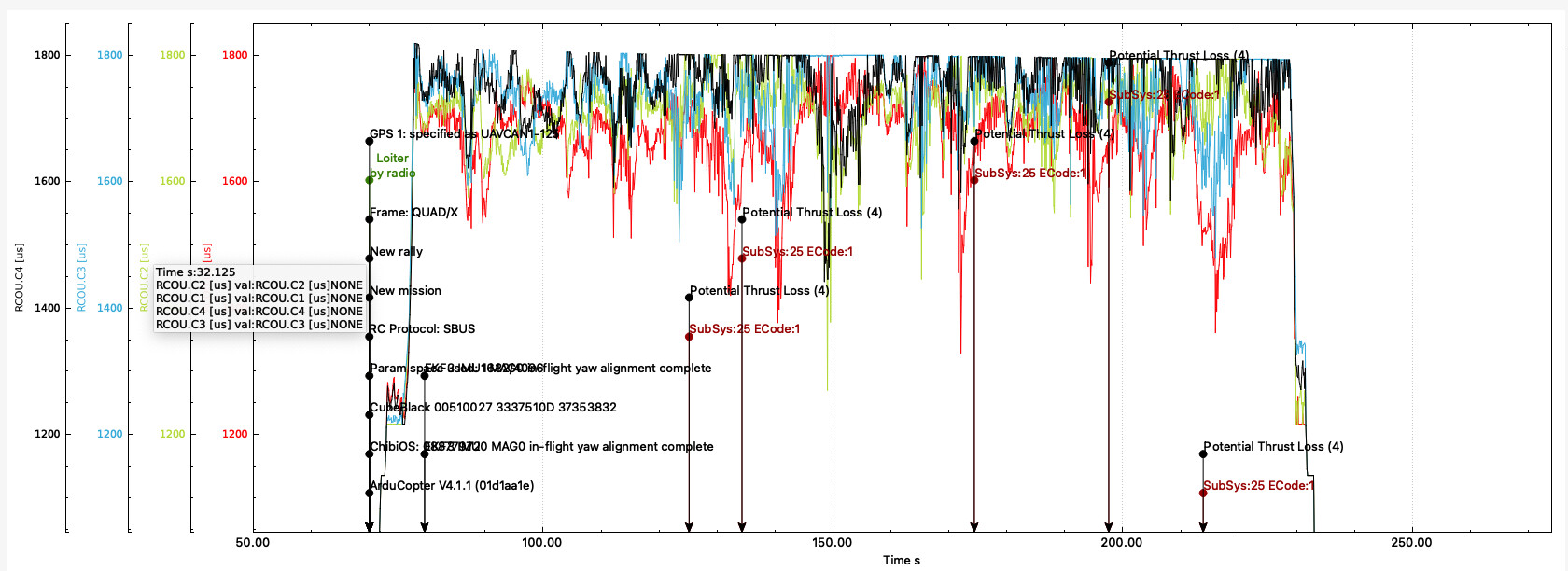
Err: Thrust_Loss_Check-1 and Potential Thrust Loss (4), and Potential Thrust Loss (3)
and the drone descended until it landed and would not respond to any input controls.
From what I was able to research, it could be a problem with the motors, esc’s, or an underpowered drone. The done had some mild tipovers a few months back on initial flights that could have caused some damage. I just do not know how to determine if and what might be damaged. The drone had been flying great until these errors. Any advice would be greatly appreciated.
The battery voltage is also very low for a 6S battery. If the voltage sensing is correct, the battery is sagging almost right away to a very low level. As a rule I don’t fly any battery below 3.55v/cell (LiPo), and for this flight the battery was below 3.4v/cell for the duration and went as low as 3.25v/cell.
Looking at the motor outputs I’m not sure the battery is the cause of your problems, but it sagging to the low levels is probably what was the final straw to trigger the thrust loss warnings since the motors just couldn’t keep up.
Being at 1600m isn’t going to help matters much either. If you can’t reduce the weight of the drone, you are going to need to research a different motor/prop setup that takes into account your altitude. You’re also going to need to do something about your battery.
If you haven’t seen it, this will help you figure out what parts you’re going to need. It will cost a few bucks for a subscription but in the short run it will save you a ton on trying to guess what gear to buy.
I greatly appreciate your your reply and sharing your expertise with me. I was afraid of the overweight/underpowered issue at my altitude. Glad to know the motors and ESC’s look ok.
Thanks for the advice everyone. ARRIS markets it as max take of weight of almost 10kg, probably at sea level. Looks like a little marketing trick.
Also, the battery is a 6s Li-Ion, which is why the voltage dipped so rapidly. This Li-Ion battery is rated to 60 amps easy and up to 90 amps if needed.
I think you all are right with the weight to power issue. Now to figure that out.
Really glad I came across this thread, not a a lot of info about the Arris m900 out there. Do you have any updates on the aircraft? Test results at sea level? I’m really intrigued with the package they are offering considering there aren’t a lot of options out there for heavy lifters. After reading this I’m considering opting for just the frame and doing a buildout myself, however I’m not able to find any reviews on the quality of the frame. If you have any additional thoughts I’d definitely appreciate some insight.
I have not tested the Arris m900 at sea level. I am at about 1500 meters elevation. I was looking for a drone that could carry a mapping camera and fly for at least 45 minutes. I had really high hopes with this drone considering its max take off weight is listed as 9.8kg and they were able to fly it (hover) for an hour with a 24,000mah Lipo. My total weight with a 30,000mah Li-Ion battery is at 7.7kg. I was hoping that being well under the max take off weight, it would work for me. My hopes were dashed, but I will move on. The drone does fly well with a 10,000mah and 12,000mah Lipo battery.
I ran into two major problems. At this weight, I was getting increased vibration in the z-axis leading to clipping. If I lower the weight to around 6.0kg the vibrations are normal. I think this is due to the arms flexing when flying around. It hovers just fine with the heavier weight. The second issue is the one described above with the thrust loss issue.
I think this M900 would be fine if your weight is about 6kg or less. As for just purchasing the frame, you may run into arm flex/vibration issues in the z-axis around maybe 6.5kg or more. I don’t think they are rigid enough.
I hope this information helps you make a decision.
Really appreciate the response, pretty bummed to hear about your experience though. I’ll probably hold off on this one for now as I’ll be close to 7kg AUW. I am not familiar with the term “clipping”, any chance you could elaborate on that?
I’m looking to mount a large spotlight underneath to light up landscapes and buildings at night, makes for some pretty cool photographs. Unfortunately this gets pretty heavy when you factor in the battery to power the leds and heat syncs to keep them cool. It sounds like I’d be close to your suggested weight range but the vibration issue scares me. Have you seen any other promising frames? It seems like DIY heavy lifts are a thing of the past. Thanks again for the help,
I had a good experience with Tarot X4 frame on a 12s setup.
At around 10kg I managed to get 20 minutes flight time with 12s/12ah battery.
Plenty of room onboard and the optional canopy is great for protecting electronics.