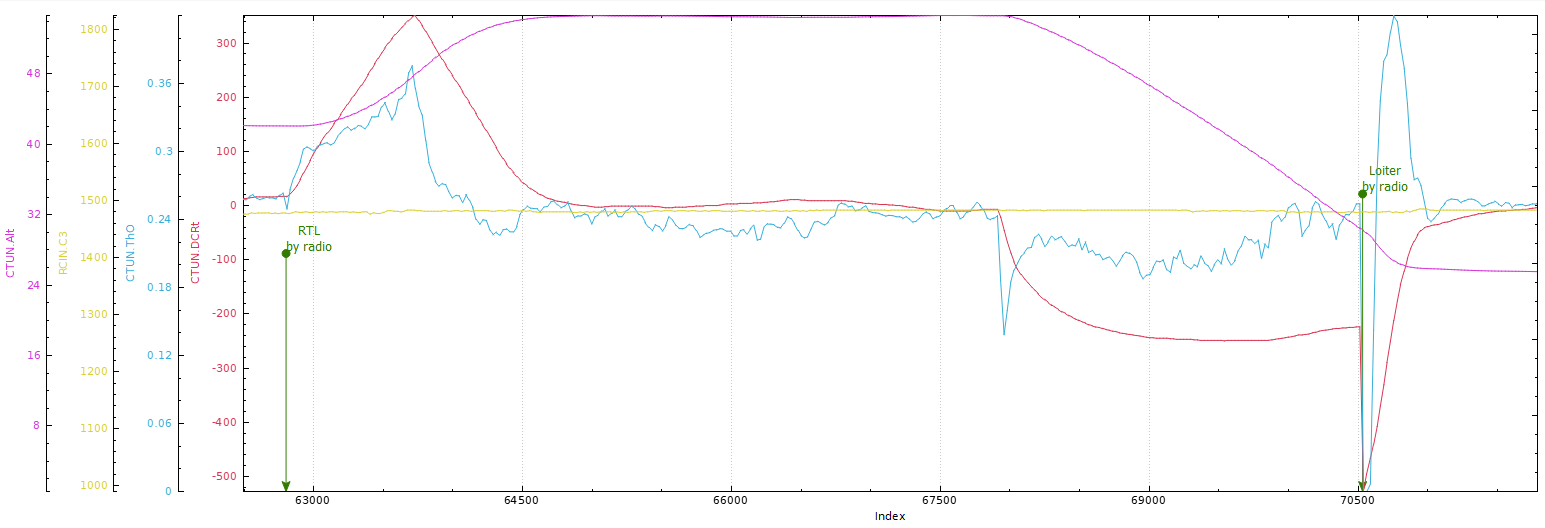
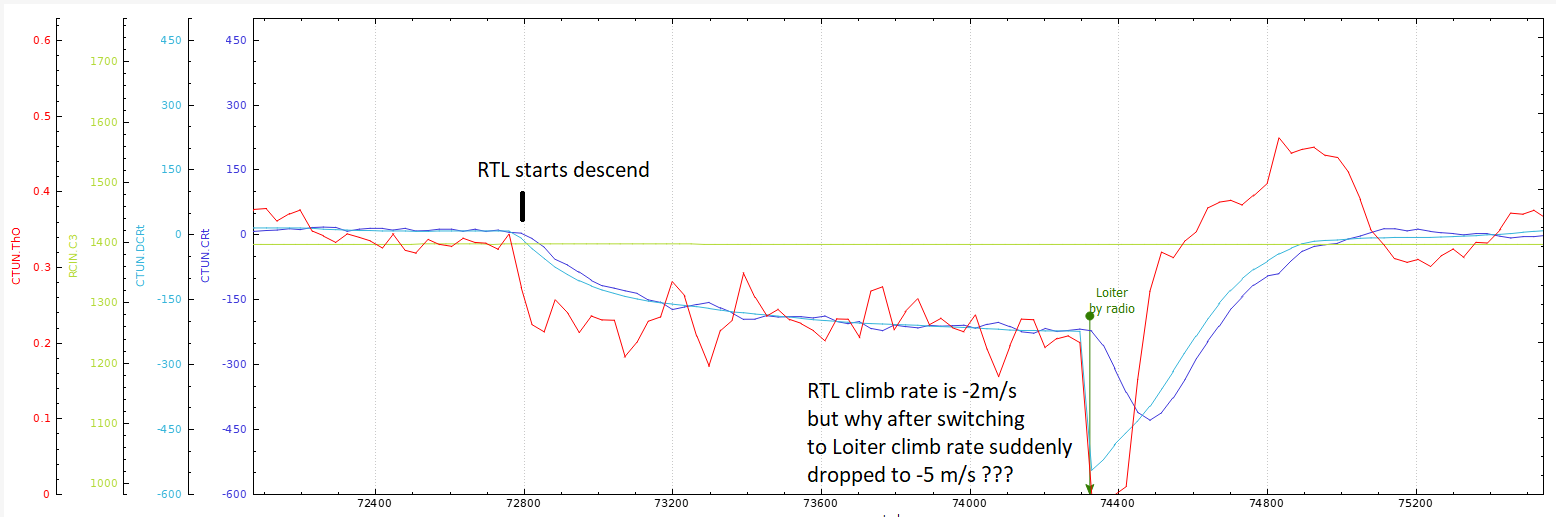
One of my recent flight, I engaged RTL, copter returned and started descending.
Then I decided to take control and switched to Loiter. Right after that I heard that motors were turned off for about a half of second or so. Copter lost about 3-4 meters of altitude. Then it stabilized. That was scary a little bit.
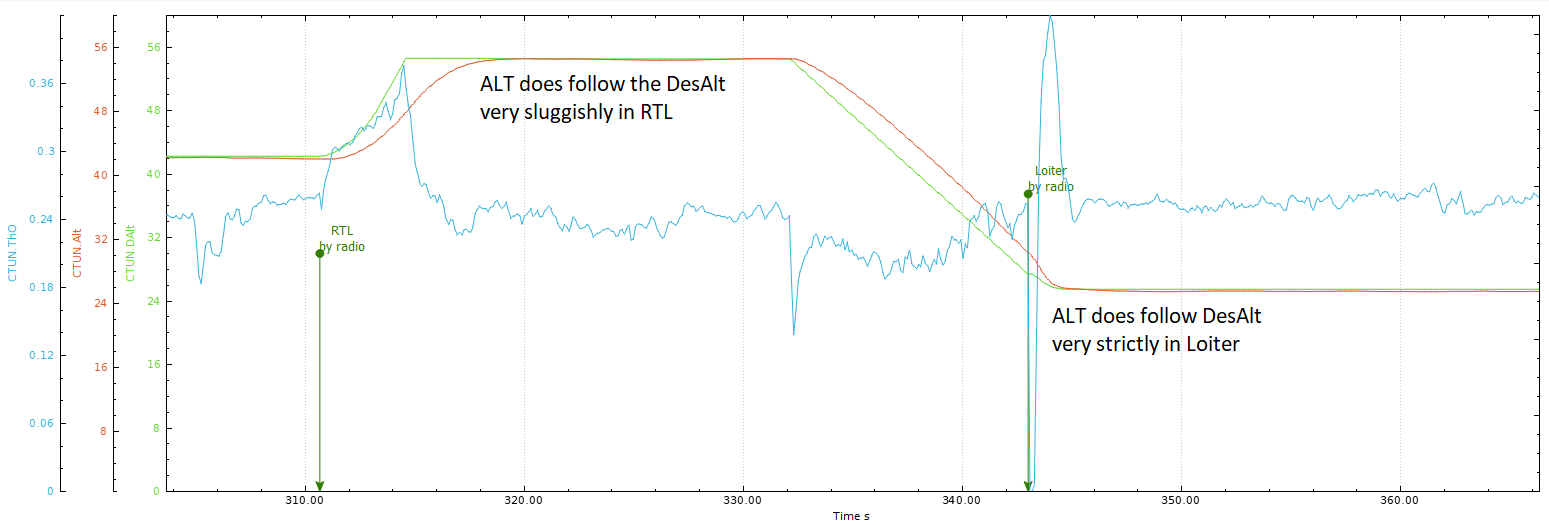
At the switching to Loiter moment the DesAlt was far away of the Alt. Loiter controller decreased throttle to minimum to reach DesAlt ASAP. Need to say it did the altitude correction perfectly, but very quickly. It was unnecessary and dangerous to rapidly decrease ThO to zero and very next moment increase up to 40% to stabilize.
So the quiestions are
why Alt follows DesAlt so sluggishly in RTL?
is it possible for transitions between modes to be more smooth?