Hi,
we are using MANUAL_CONTROL to control our Octocopter and have set up notch filtering. When loading a log into the filter review web tool, I get the
No tracking data available for Throttle notch
error message. Is it simply not logged when using mavlink? Or can it actually not be used for that?
I have followed that excellent guide to the best of my knowledge and ability (and sped up the process with some prior knowledge from a very similar copter we built previously).
I would have preferred to have RPM tracking, but we have T-Motor Alpha ESCs, so no RPM tracking for now until we add the Data Link.
If you could point me to the step where I could have missed something, that would be great!
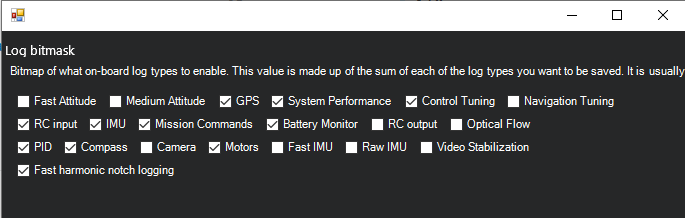
I will check if it’s the log bitmask, I don’t have any more ideas for now
@amilcarlucas thanks for putting together the drone configure and tunning post it is an excellent document.
I’m having the same issue that @WARGRaph mentioned and I reviewed my 13_logging.param file but the RC out is enabled.
Here I have a log file. Any advice on this is greatly appreciated
Good job , you understood the concept and updated the comments, so I could follow your reasoning in the decisions you made !
on 07 why not restrict GPS_GNSS_MODE ?
on 11 Excellent, you understood the idea !!
on 16 INS_HNTCH_REF should be the expected MOT_THST_HOVER because you have no ESC telemetry
Thanks. This document a procedure is worth the time of reading thoroughly.
For GPS_GNS_MODE I went with the default but I think I’ll change it to 65 (GPS + GLONASS) since it has been mentioned in other forum posts and it is compatible with my Here 2
We did some improvements in the parameters and added a new X11_plus template to the ArduPilot Methodic Configurator that uses throttle based notch filter. You might want to test that one.