I’m pulling together my 2nd build with Pixhawk 2.4.8 Version 4.2.0 and SimonK30 Amp speed controllers. I can arm the drone but the throttle PWM values won’t pass through to the motor outputs. They sit stubbornly a 0 PWM. If I change the servo output to RCIN3 then the throttle PWM does pass through the FC. Why won’t it pass through with Motor1,2,3&4 selected?
Radio has a calibrated fine and FC sees correct and normal radio values and motors spin ok with RCIN3 selected instead.
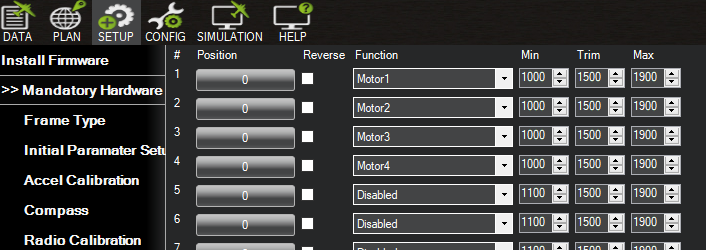
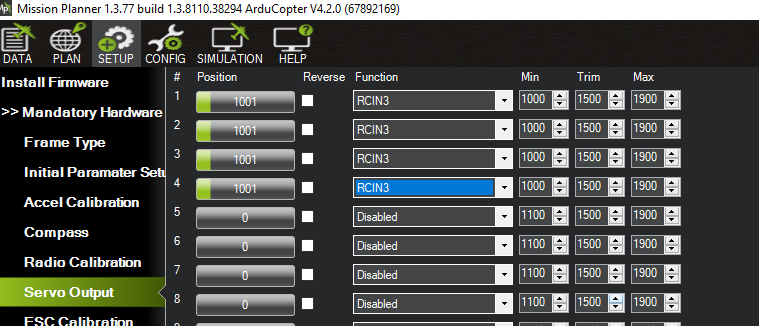
See 2 setups below with outputs:
Problem - Throttle PWM is 0 for all 4 motors
Have I forgotten to set up something? or is there a safety parameter that is stopping it from running? The safety switch I disabled and the copter arms ok.
You have to learn the concept: RC In 3 control the Throttle. The PWM go to Pixhawk. Some computing is made and Pixhawk issue a RC Out order to motors (ESC 1 to 4 or more…).
Parameter File tboyle.param (16.1 KB)
Hi Dave @dkemxr here is the file. I’m sure it is a bloody parameter that is the issue. Is there a way to reset parameters? It wouldn’t re-install the firmware as it is already the latest.
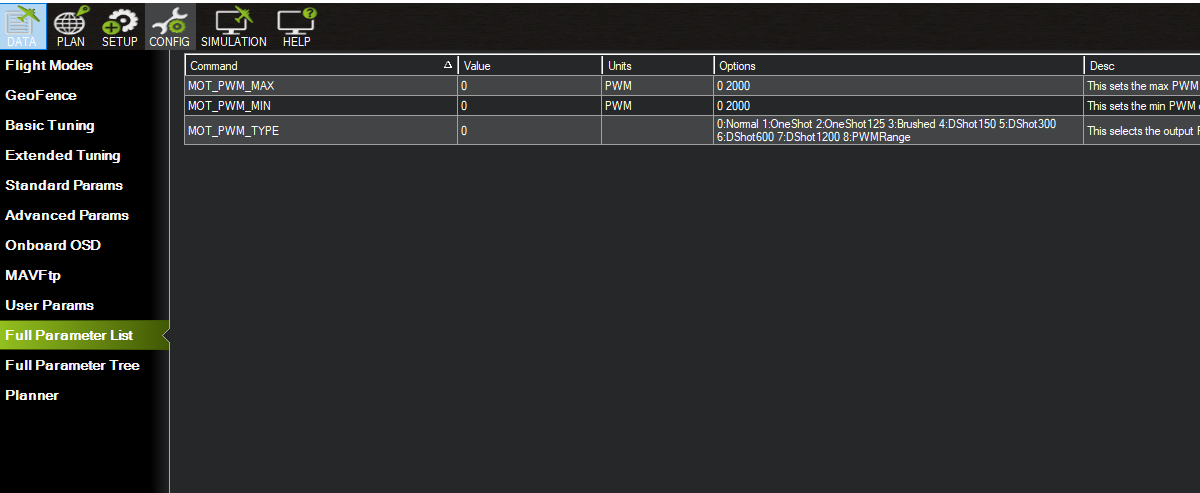
Check your MOT_PWM_MIN value. It may need to be manually set. I just upgraded a board on a flying quad and that defaulted to 0, in spite of RC3_MIN being set properly.
You might be onto something here. Both Min and Max are at 0 (not something I changed).
Should these be min = 1000 and max = 2000? My controller min is 1000 and maxes at 1870.
Should the MOT_PWM_TYPE remain at 0 (I’m using SimonK30A ESC)?
Honestly this is the first time I’ve had to adjust this so I’m just thinking it through myself: Try it at 1000, then go try the motor test function. If that doesn’t work, or if you need to bump the throttle % up a lot (>25%), then try 1100.