I have a Tilt rotor quadplane here, Ardupilot 4.3.1
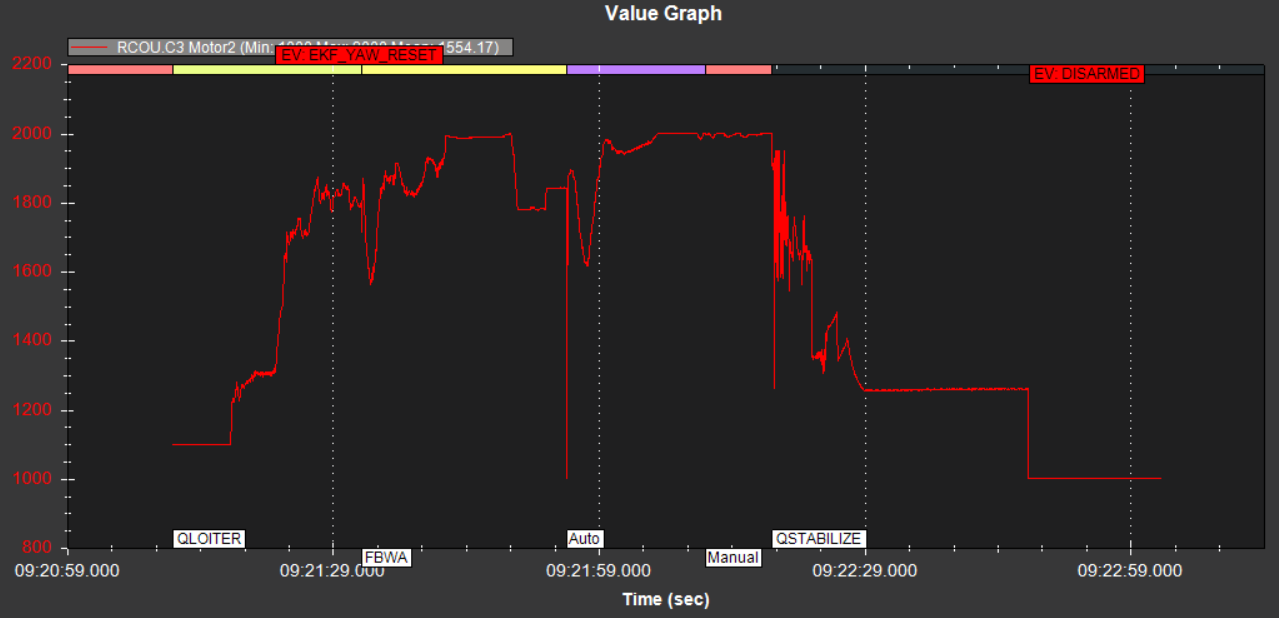
Aircraft transitions and flies correctly in FBWA. However, upon changing to Auto, (or presumably any other mode with auto throttle) in some fraction of a second the throttle output plummets to 0% before returning to a controlled value, which is very difficult for the motors and ESCs. This is despite the default 100% setting of the throttle slew rate.
Is this a known behavior? Is there any way to prevent this?
Thank You