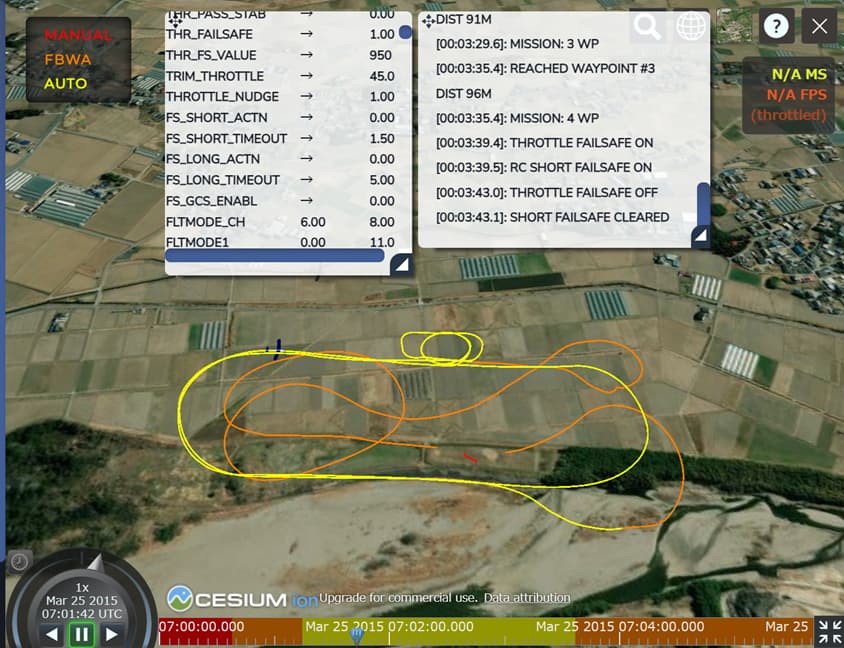
Several days ago I tested the Scripted Aerobatics of the ArduPlane 4.4.2. The tricks I tested were a two consective loops and a vertical box in a mission flight. These tricks were successfull but there were throttle failsafe and RC short failsafe messages before starting the loops. The parameters I used were,
THR_FAILSAFE=1.00
THR_FS_VALUE=950
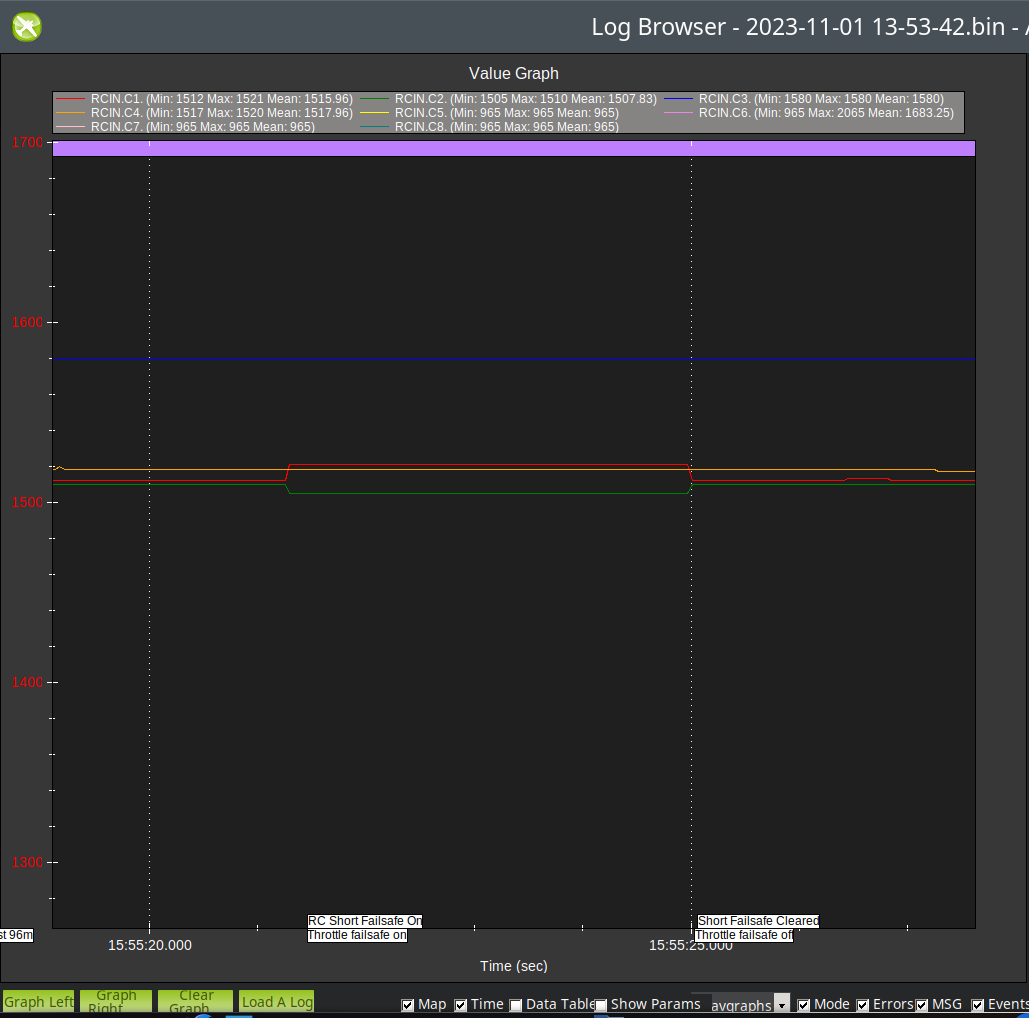
During the “Auto” flight mode, the RC throttle (RCIN.C3) was kept at 1565 and the throttle comand outputs (RCOU.C1) from the FC(MATEK H-743 WLITE) were well above 1400.
Looking at the .bin file I suspect you must have RC failsafe setup on your receiver.
So there was probably a brief 4 second signal interruption between RC transmitter and receiver and your receiver gone into failsafe mode which in turn triggered throttle failsafe in your FC.
You should not have any failsafes set in your receiver as this can conflict with FC’s failsafe configuration.
I would clarify that.
You most definitely SHOULD have transmitter/receiver failsafe configured and working.
Newer receivers that do SBUS can indicate failsafe within the data sent to the FC, but should still have “No Pulses” set as the failsafe action.
Older receivers (and new ones unless you check and change them) default to the channel positions that were in place when you did the bind procedure between transmitter and receiver.
The old way was acceptable for pure RC planes, where you might wish to set controls at some fixed position in the event of RC loss. Theoretically you could set a channel to indicate RTL mode, but this should only be a choice if there is no better way.
Where there is an intelligent flight controller involved, it should be fully aware of the RC loss and take appropriate action (eg: RTL) and should never be tricked into thinking it’s still flying under pilot control by that “old” failsafe method of setting the channels in some fixed state.
The way to bind those older style transmitters is:
Set throttle trim all the way down and ensure the throttle stick is at minimum before binding, then set trim back to normal (no trim) after binding. In some radios you could configure the throttle channel to be -120% for example, or you may have a throttle-cut switch (which is still useful these days!)
Now use the Mission Planner RC Calibration screen (or parameters) to check what your minimum normal throttle PWM value is, and ensure the throttle failsafe value is at least 30 below that.
You can check the failsafe is working by turning off your transmitter without even arming or flying, you should still see the warning in MissionPlanner HUD and messages.
Thank you Karl,
Can I understand that there was 4 seconds signal interruption between TX and receiver?
If yes, I think the messages I got are correct and there is no problem I leave current failsafe set in my receiver. The most important thing I must do is to correct the receiver location to prevent signal interruption. Is my understanding right?
Regarding receiver:
Have a look if there is any other wiring like power wiring close by and if so try to move receiver away from that. You can also simply twist the power wires which helps to reduce RF interference.
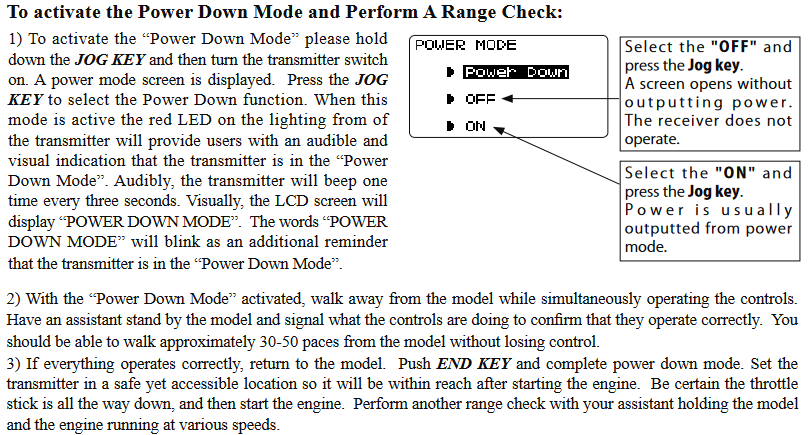
Some transmitters have a range test function in order to test if reception is OK. However, that can produce false results if the cause is linked to motors, ESC’s, wiring and the like as you usually wouldn’t run the motors at speed as you would during a flight. - But some find ways of doing that during a ground-based test. I.e.take props off (but current flow won’t be the same)
My TX is FUTABA T10J and receiver is R3008SB. As I am not familiar with this field I can not judge my receiver is older style or not.
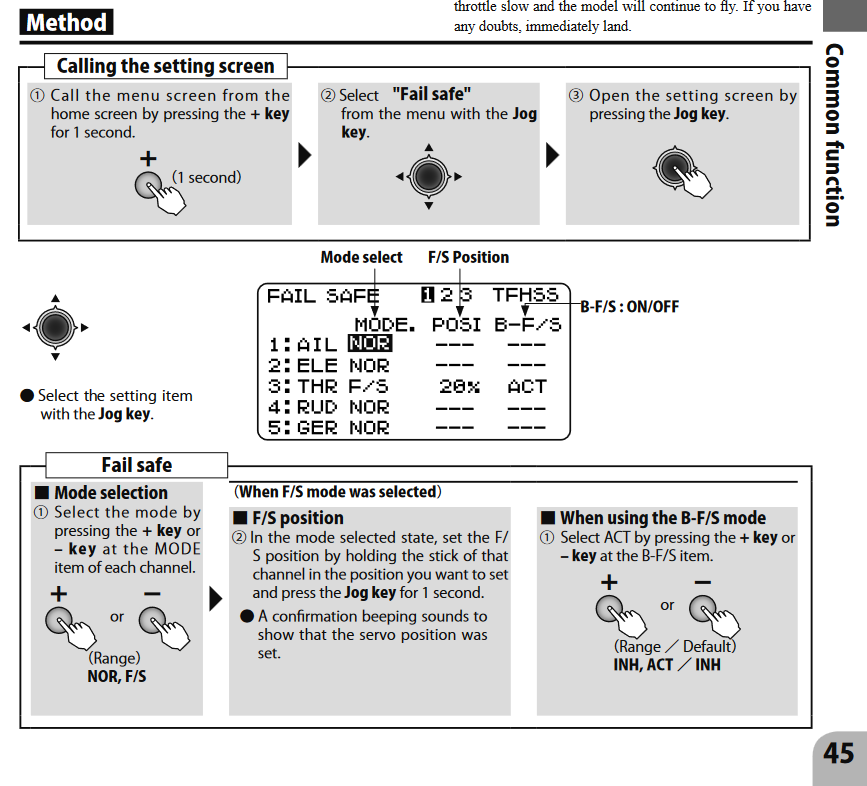
I checked receiver’s manual but I could not find any comments on failsafe. Do you know how I can set it “NO Pulses” ?
You are correct, the receiver manual doesnt even mention failsafe.
The transmitter manual does though - the method is setting channels in pre-determined positions
So you could use this method to try and set the throttle channel to some negative percentage, like -10% under failsafe conditions (the Battery failsafe wont matter unless you bought the extra Futaba cables and stuff, which I doubt)
Thank you Shawn for your very kind teaching.
I will follow your suggestion above and if there happenes something I can not understand I will ask you again. Arigatou Gozaimasu.
Shawn,
I tested following your instruction but I could not set throttle position negative because the position is set by the throttle stick. I set the throttle trim as low as possible and the resulted position was 4%.
With this position I connected my plane to MissionPlanner via USB.
When I turned of the transmitter, there appeared following messages,
11:07:39 :: Throttle failsafe on
11:07:39 :: RC Short Failsafe switched to CIRCLE
11:07:44 :: RC Long Failsafe On RTL
So I think the problem still remains. Could you teach me what I shall do next ?
Those messages look like failsafe is working correctly.
Just ensure that failsafe does not happen for any positions of the throttle stick in normal operation.
Shawn,
I am confused very much because those messages are same with that I got in the flight test.
Do you mean that the messages I got in the flight test was quite normal because there was a RC signal interruption?
Then what was the reason you recommended me to lower the RC throttle position? I think original 20% works well and there was no need to lower it down to 4%.
It can depend on the receivers behaviour, I was trying to cover all bases.
Some that claim to be outputting SBUS still dont declare a failsafe in the data, and so the throttle channel is the only reliable indicator in some circumstances. Or another channel set to engage RTL mode, but best not to go there.