I open issue at github https://github.com/ArduPilot/ardupilot/issues/13647
and I wish to have some discuss about the throttle curve and collective curve in rsc mode 3, many user may confused for that
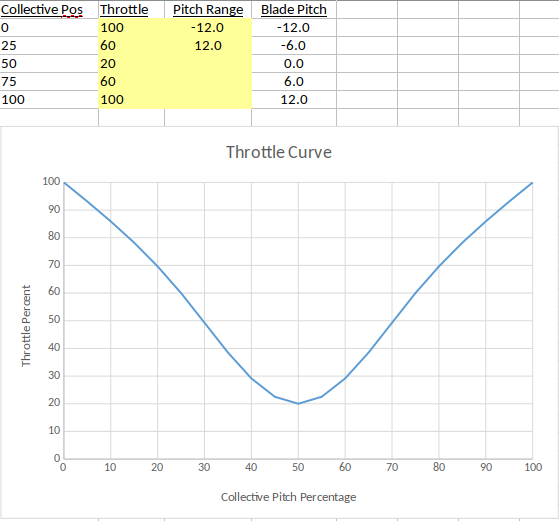
Refer to the comments in the github issue. I think the only issue is that you don’t have the throttle curve set right for the pitch range you are using. Your pitch range is -12 to +12, which would require a throttle curve of something like 100-60-20-60-100 (for a piston engine). The throttle curve would look like this, commonly called a “V” throttle curve so power matches pitch loading.
hi chirs,
For the “V” throttle curve and any other throttle curve, IM_STAB_COL_1 must be set 0 and IM_STAB_COL_4 must be set as 100, so have you see any scenario that IM_STAB_COL_1 is not 0?
And for most of RC transmitter, the build-in collective curve is 5 points, should we consider to change it?
No, it doesn’t. Look at the above example throttle curve. This would be active in acro and would allow inverted hovering, or whatever.
Now, set the IM_STAB_COL_1 to 40 and the COL_4 to 90. When you start in Stabilize you will get a slight increase in throttle with the collective all the way down because you are loading it with negative pitch. As you move the collective slightly up it will go to feather pitch (no load) and the throttle drops a bit. As you raise the collective to take off it will increase the throttle to compensate for the pitch loading. The maximum collective will be 9.6 degrees, maximum throttle will be 87%. But you don’t need full throttle because it is assumed since you set the range to +12 that you have adequate engine horsepower to maintain rotor speed at that pitch in a full-collective climb at full throttle.
It will work perfectly normal.
That throttle curve is just an example. It won’t be right in the example - it has to be tuned for your engine. I have seen very few piston engines that can pull 12 degrees of pitch and maintain engine rpm at full throttle. More typical would be around 9 degrees. 3D pilots will set it to 12 (or even 14) to use rotor inertia for 3D maneuvers. But they have very lightweight helicopters, usually have them wrapped up to the max so they have 300-400 rpm of sag and it’s not a big deal in a full collective punchout. UAV is different. You won’t pull 12 degrees of pitch with a 25kg helicopter. It will fall flat on its face.
The throttle curve is not based on where the RC3 stick is. It is based on the actual collective output from the controller.
yes,that’s make sence
so that’s the issue what I concerned, for most RC transmitter, the throttle curve is based on the RC3 stick position, throttle curve and collective curve is absolutely seperate system.
That is not the case in ArduPilot because the ArduPilot system will work if the RC link is lost. In the conventional RC transmitter setup you are referring to, if RC link is lost so is throttle curve control. That would not be acceptable for an autopilot system.
Therefore, you cannot match up any sort of 5-point collective curve for the RC with the throttle curve controlled by the autopilot. It doesn’t work that way.