Hi All,
I’m encountering a strange behavior where it seems yaw is being coupled into throttle command despite the Frame_Class definitely being set to SingleCopter. It also seems that there is quite a bit of random erratic throttle movement. Has anyone experienced this before? I was able to get this same airframe working well on iNav but for whatever reason I’m having no luck with Arducopter.
it looks like the throttle is raised when it is failing to meet its desired rates.
The mixer is here
The coax/single code is not used a huge amount but should work OK, i think. Probably there is a little more going on than the mixer that iNav uses (disclaimer - i have not looked at the iNav mixer)
I am having similar problems with flapping fins and erratic controls. I did notice that the oscillating yaw gets much less in the air after letting go of the craft.
I was able to get it to loiter and then RTL and land, but it is still erratic. I posted my PIDs in the other thread here in the SingleCopter section.
Hi Paul,
I noticed the same thing. At first my PIDs were just so far off that the vehicle was no where near stable and I thought something else was wrong. Now I’ve gotten it tuned well enough to hover, but yaw is still behaving very strangely. I’ve been holding off on posting my PIDs until I get it tuned better.
Good to know you’ve have GPS functionality working! I have not gotten that far yet.
Something else I noticed. The same exact airframe flew quite well with INAV and an F411 controller (yes, I copied you; thanks). Interestingly I had to move the battery farther above the main part of the machine to get the CG higher and this was eventually how INAV and the F411 were happy.
With SingleCopter I had to move the battery down lower to get a CG with which SingleCopter could cope.
I observed that while in AUTO flying mode, the throttle will automatically increase to help stabilize the craft. This was especially noticeable when the throttle was decreased to allow the craft to descend.
What usually happens is that with the throttle reduced during a descent, the craft begins to tip out of control as the thrust vectoring becomes less effective. Then the throttle automatically increases and the control system is able to recover the craft to level flight.
Thanks for the help! I’m going to try giving my fins some yaw bias as you discovered in the other singlecopter thread. Before seeing that post I had just about given up. Will also try lowering the CG as you recommended.
The throttle-yaw coupling doesn’t seem to be as much of an issue now.
Made good progress. Now have the machine flying a complete mission from take-off to landing. Well, almost. It tip overs on most landings.
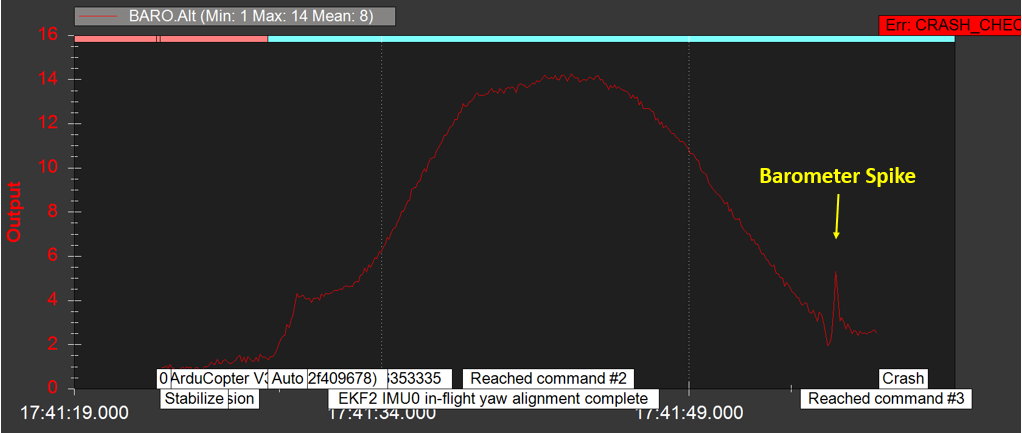
My theory is that with the flight controller located directly above the inlet of the prop shroud, it is subject to unwanted pressure changes - especially in ground effect when there must be back pressure. This makes it difficult for the flight control software to accurately estimate the final landing rate of decent and it therefore does not turn off the motor. Here is the Arducopter (singlecopter) dataflash log excerpt showing the spike in the barometric altitude as it nears the ground. The crash is after it tips over.