My quad ThH is far out from ThO as shown in attached CTUN graph. With MOT_HOVER_LEARN set to the default of 2 (learn and save), I take the quad twice to a steady hover, hoping the ThH will gradually approach ThO, but it wouldn’t. See also the param.
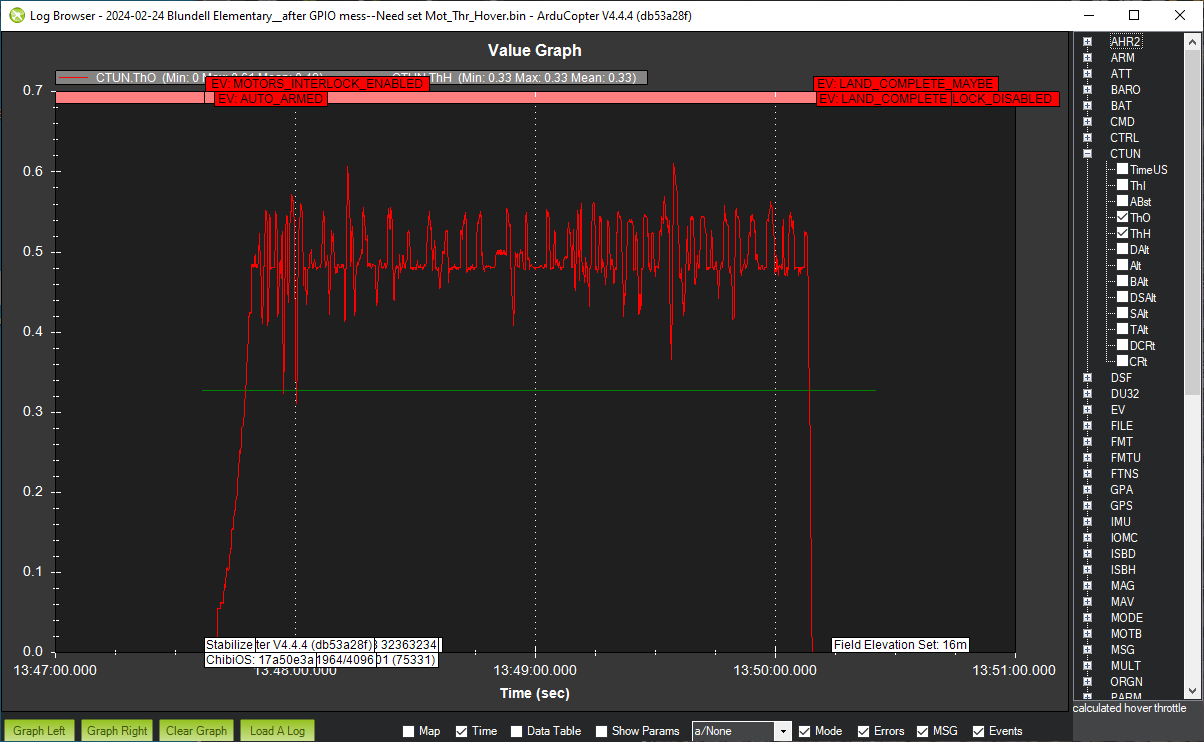
param__S500__26-02-2024.param (17.4 KB)
Pls also refer to the following CTUN graph 1 year ago in which ThH coincides with the average value of ThO, and the weight of the quad has not changed in this 1 year period, so power to weight ratio stays the same.
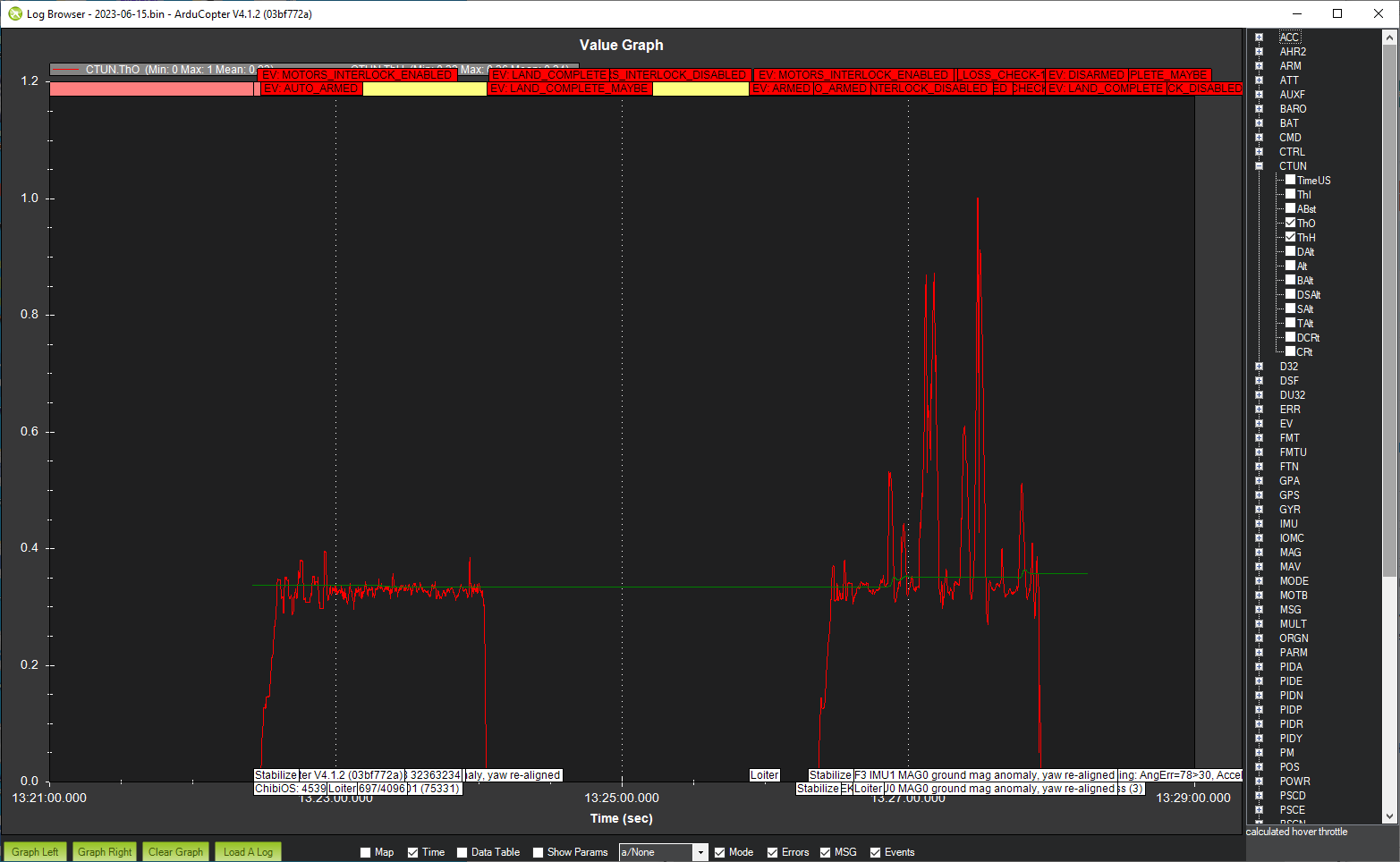
My question is : - What should I do to lower the ThO value ? Right now I need to raise the throttle to over 50% to achieve hover. 1 year ago, I only need 30-45% throttle to hover. I have tried calibrating the ESCs , but did not change anything .
Pls help.