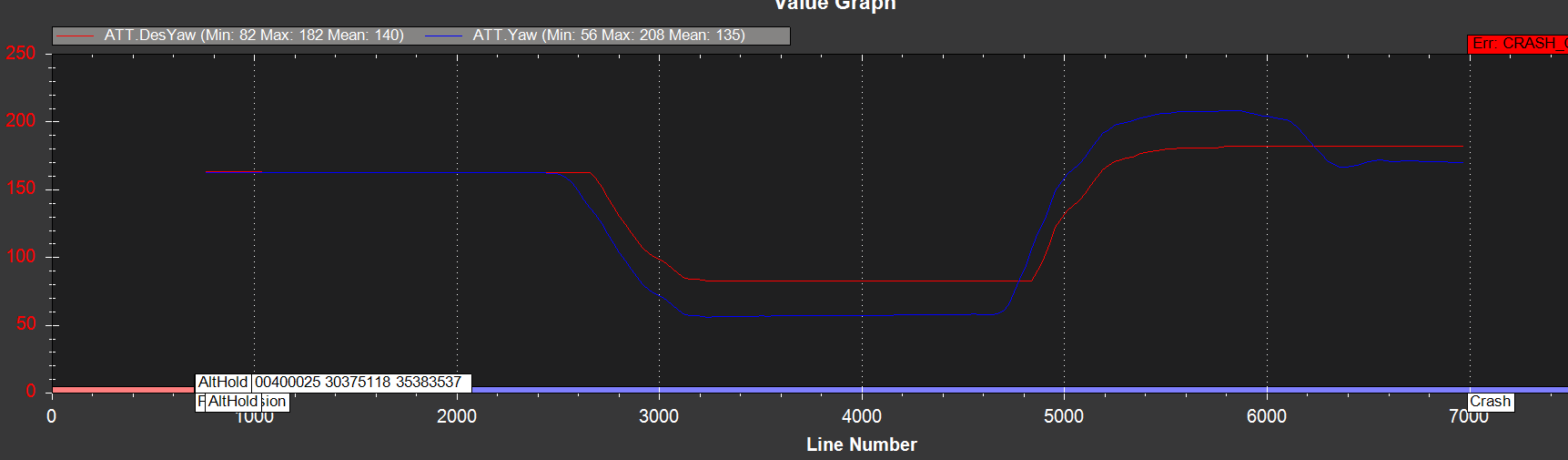
I tested by artificially changing the yaw of the copter and then letting go, the plane did not return to its original posture. But I hope it can return to the original attitude, is there any way to achieve it?