With dataflash logging, log data can be recorded normally. You can see screenshots of log analysis through the pictures in the top floor post. Just because it is an on-board flash memory record, it has a small capacity and cannot record more data, but it can record at least 3 flights of about 5 minutes each.
Sorry, but I ca n’t provide the params file to share with you, because the ArduHeli debugging prerequisites, there are many types of helicopters, the mechanical structure, assembly, and debugging are very different. The steering gear, ESC, bec, etc. are also very different Therefore, the different requirements of these prerequisites lead to completely different requirements for the parameters, and it is not possible to directly apply params of other carriers. My suggestion is to carefully refer to the official wiki’s guidance document, and rigorous debugging step by step is completely successful.
Mini helicopters can be debugged and installed indoors…
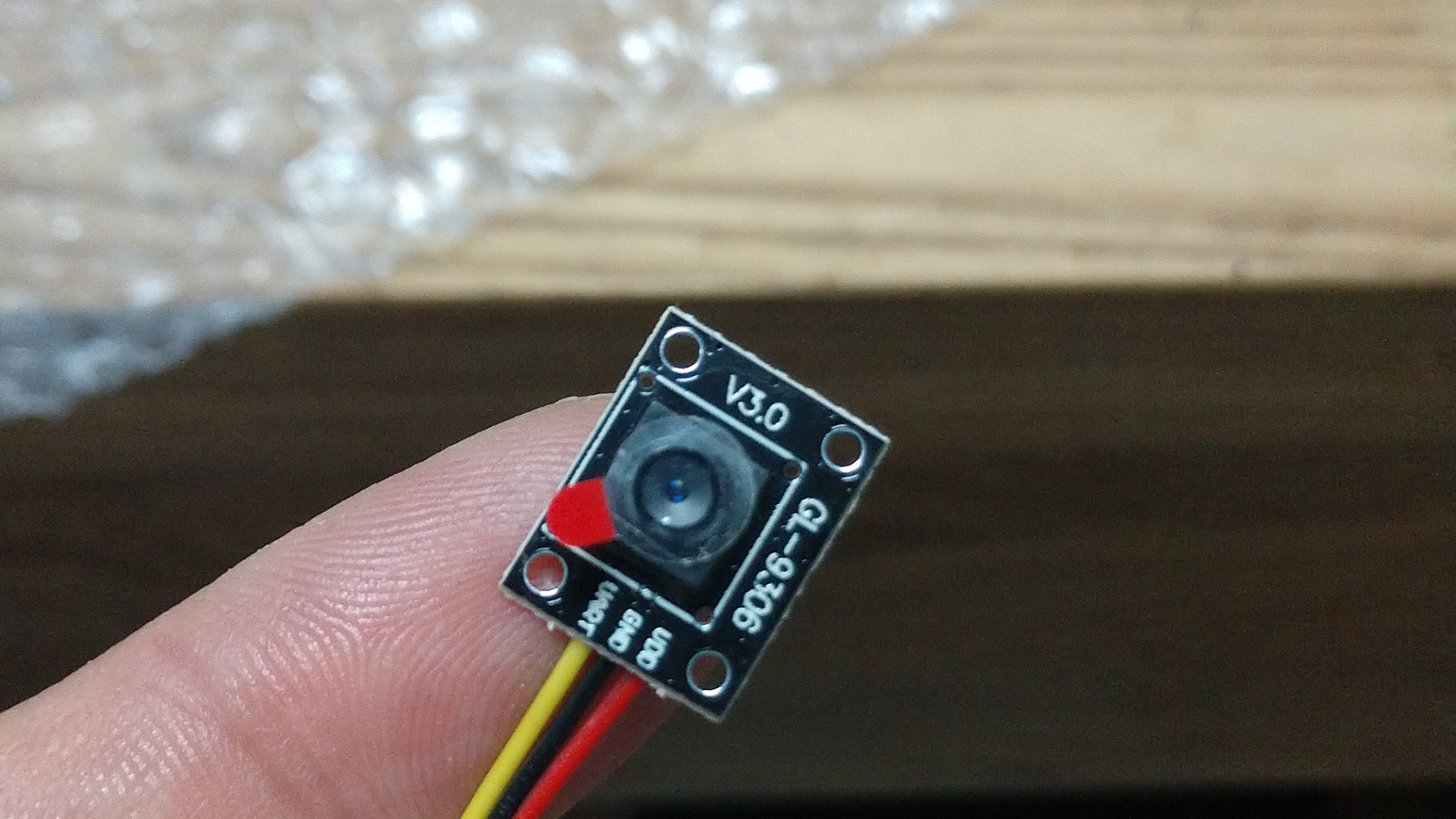
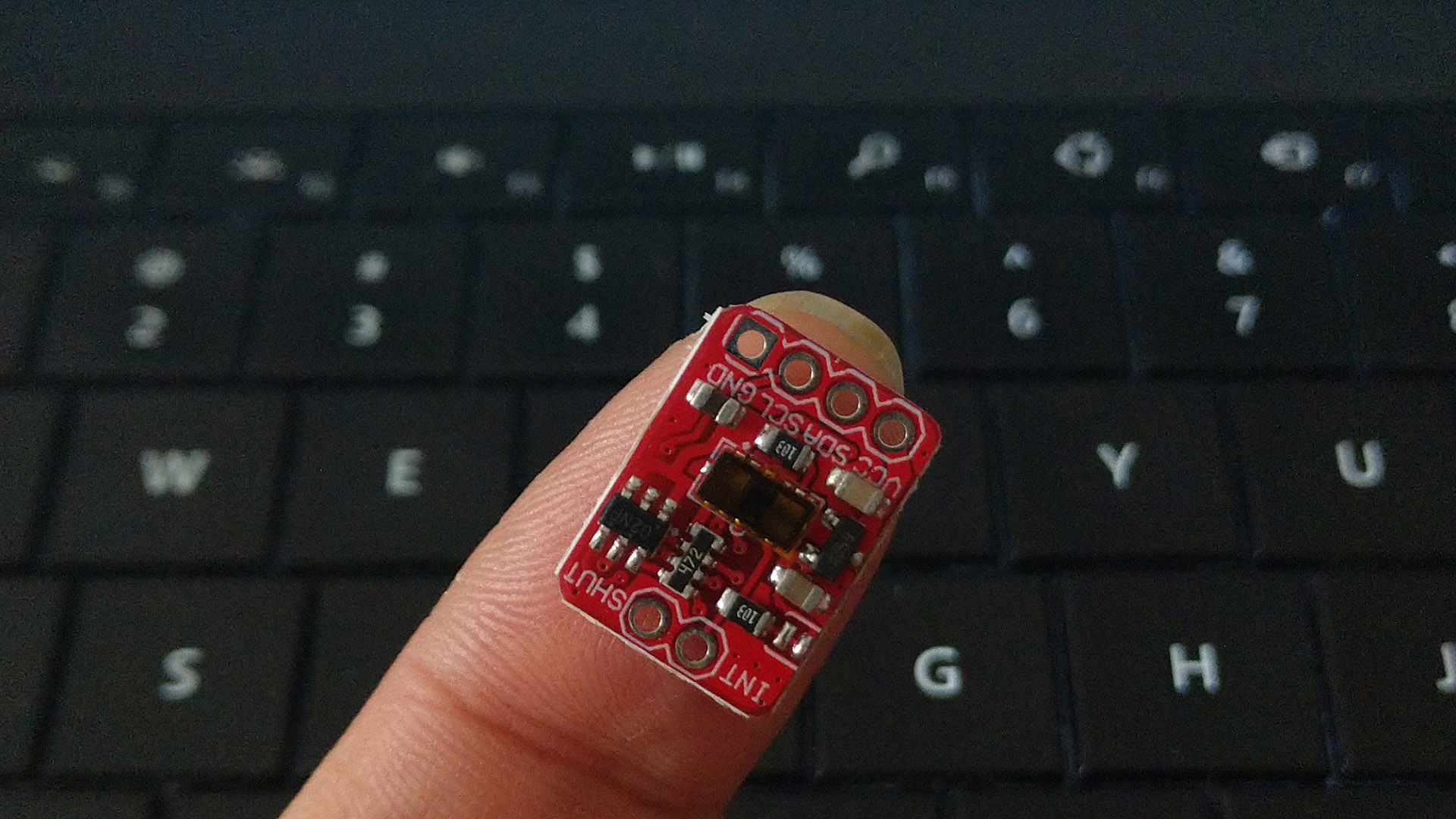
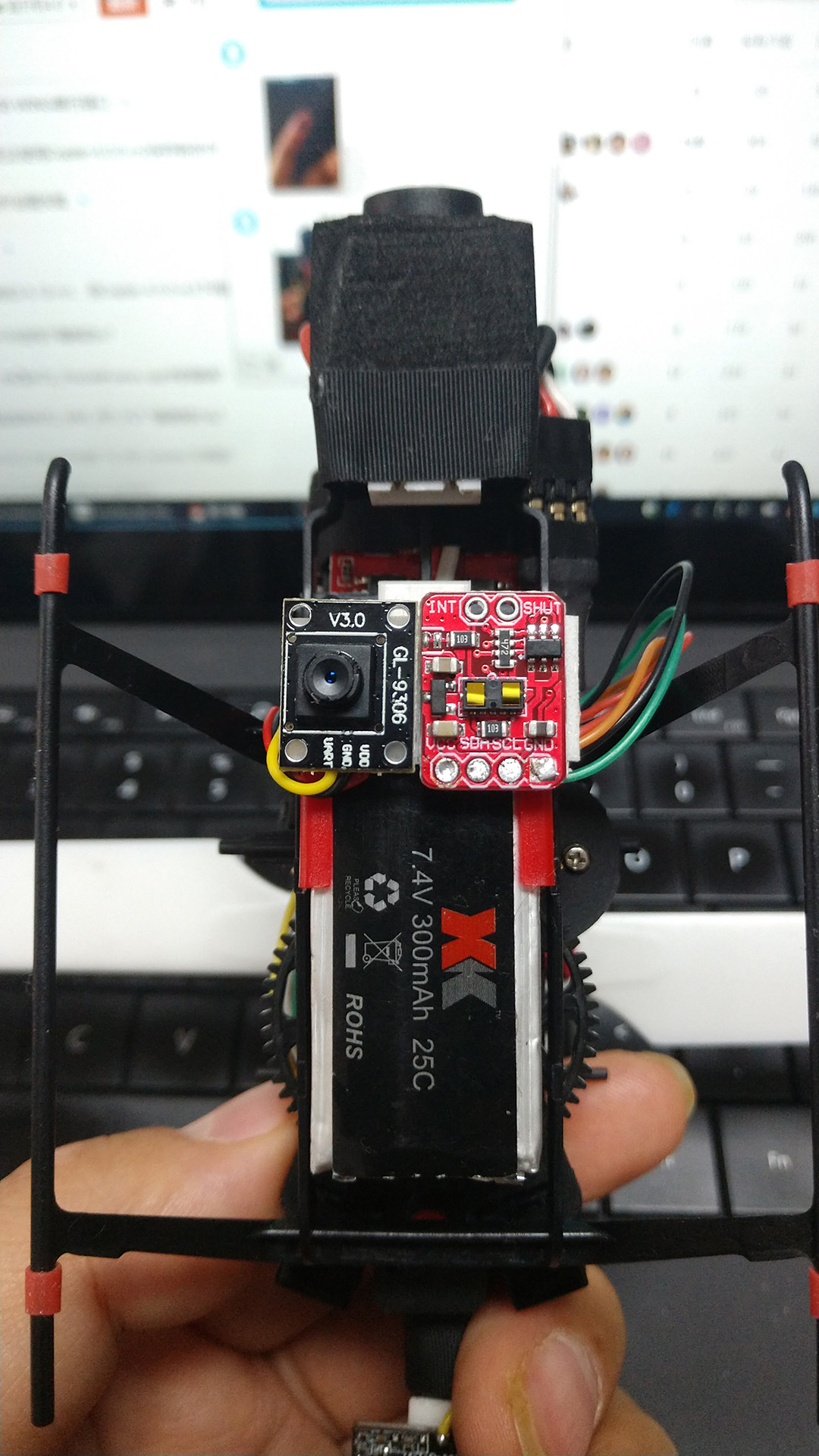
Based on the current foundation, the optical flow sensor and Lidar rangefinder module have been further added. After a period of complicated debugging and experimentation, the traditional helicopter was finally successfully implemented in the indoor Loiter by optical flow positioning for the first time, cheers !!!
Here is a slow motion video clip with music:
5 Likes
Where did you find the 2S brushed ESC? I just got one a K120 and want to convert it.
Online store in our country: www.taobao.com
I am so impressed with your work. Just amazing.
Question - did you go through ALL the mechanical set up steps shown in the Traditional Heli Wiki or do you have special alternative steps?
https://ardupilot.org/copter/docs/traditional-helicopters.html
During set up…I’m trying to picture how you made rotor blade pitch angle measurements with a pitch gauge on such small, bendy (flexible) blades & blade mounts. Generally, toy helis have a good amount of swash plate slop too. How did you manage to get such impressive stability? Please tell us all.
Bravo to you on this great work. You are inspiring me to challenge myself more.
Thank you for your attention
I do refer to the steps in the heli wiki for patient debugging, and combine my years of experience in debugging and flying mechanical and electronic equipment of traditional helicopters.
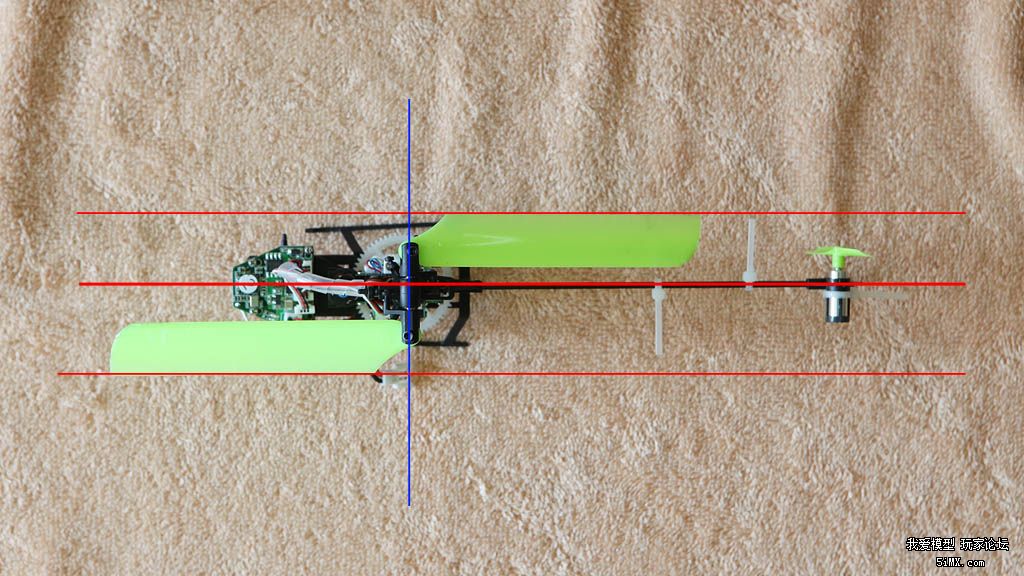
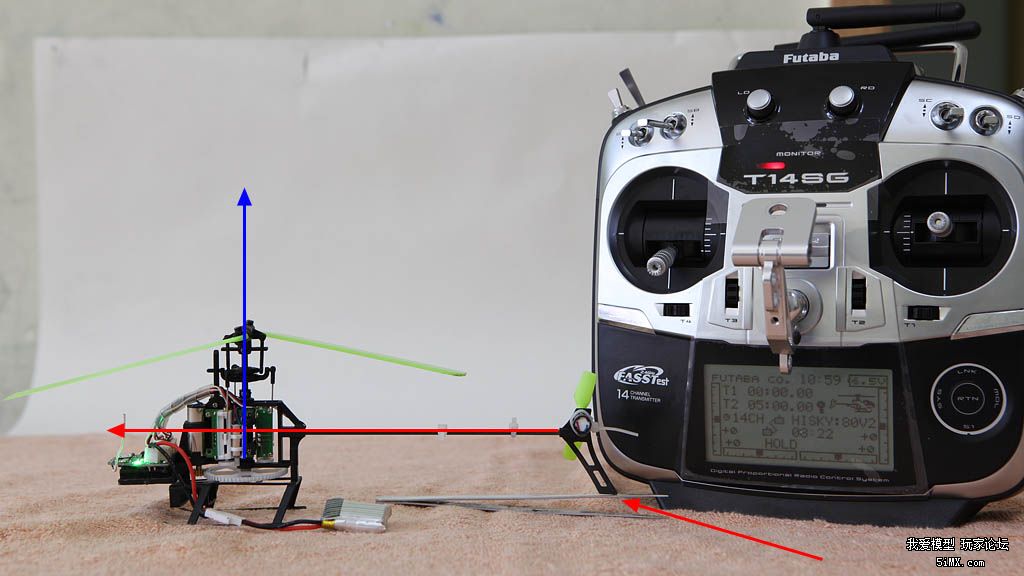
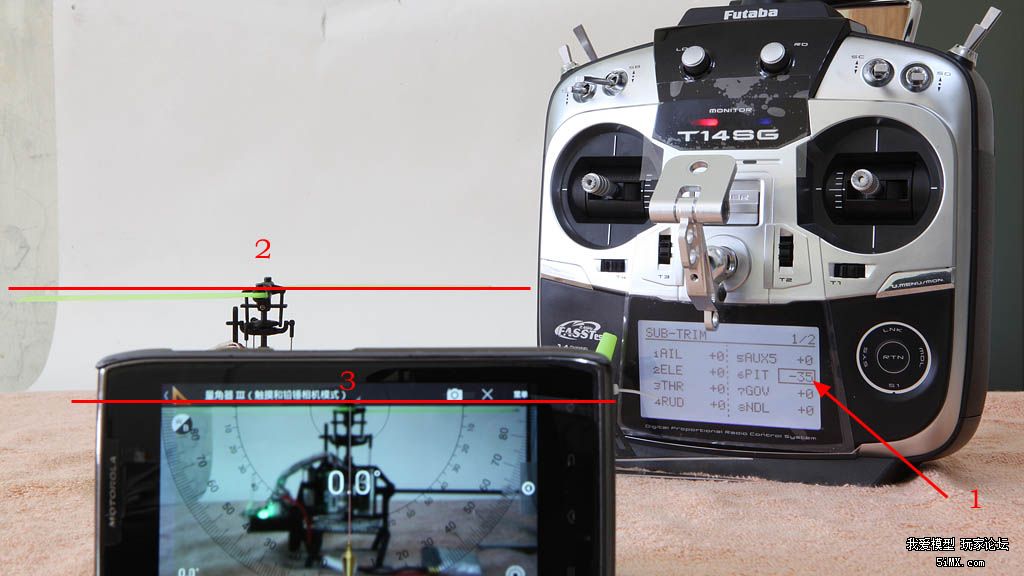
For the blade pitch angle setting of ultra-small helicopters, there is a more convenient method, such as folding the two main blades in the same direction by 90 degrees, and then measuring the pitch is very effective.
Sir Zhangpeng - could you take a photo or video of exactly how you position and use the pitch gauge with both blades folded back? When I measure small helicopters, the blades are too small to support a pitch gauge and I get wildly varying readings. Thank you. Mike
Similar to the method in the picture below, use the camera and measurement app of the mobile phone to cooperate:

1 Like
Sir Zhang - such ingenuity and creativity for making Pitch measurements on these small aircraft. I would never have thought of such a practical method on my own. I’ll try the same technique on a 450 size aircraft and compare it with a traditional RC Logger. Thanks for sharing your techniques and knowledge with us.
@zhangsir Were you able to see the optical flow values on MP?
You can see optical flow data in the HUD window of MP!
opt_m_x
opt_m_y
@zhangsir Got it, I tried the same setup as you with Copter 4.0.0 and I don’t see values. Also, tried the same setup on Kakute F7 AIO, same issue. Any ideas what might be wrong?
congratulation for awesome work!
would you share your parameter list file?
hello, can you share link taobao to buy mini brushed esc of your project?
can i ask, is that esc suitable with bl heli
Sir Zhangsir,
I’am a fan of your work. It’s really remarkable!
Can you post a picture of the wirings/ connections of the three servos and the tail motor?
Thank you.
Sir Nitin J Sanket,
Good day. You mentioned that you had the same setup.
Where you able to complete your micro helicopter?
I was hoping that maybe you can share pictures of your wirings?
Thank you very much.
The kakuteF7mini never worked properly for me. However the Kakute F7 works like a charm. Here’s the documentation for it: https://github.com/prgumd/PRGFlyt/wiki/PRGWhippet
Thank you very much for sharing your quadcopter set-up.
Congratulations on your PRGWhippet quadcopter.
Have you worked on a separate helicopter project?
Nope, I only work on quadcopters.