
If this is a test with no props or pinned down, the results are invalid. Please do not do this tests.
Yes it’s a test but if I put all the props on and try to fly my drone the same thing happen no.3 motor are not spinning same rpm to 1,2 and 4 motor all ESC are all calibrated, I think its a software issue.

Hover tests with the ropes on there will produce questionable results. Better to use the proper test tools. Have you done the motor test?
What happened when you used the motor test and tried to run motor 3 (D in the test sequence)?
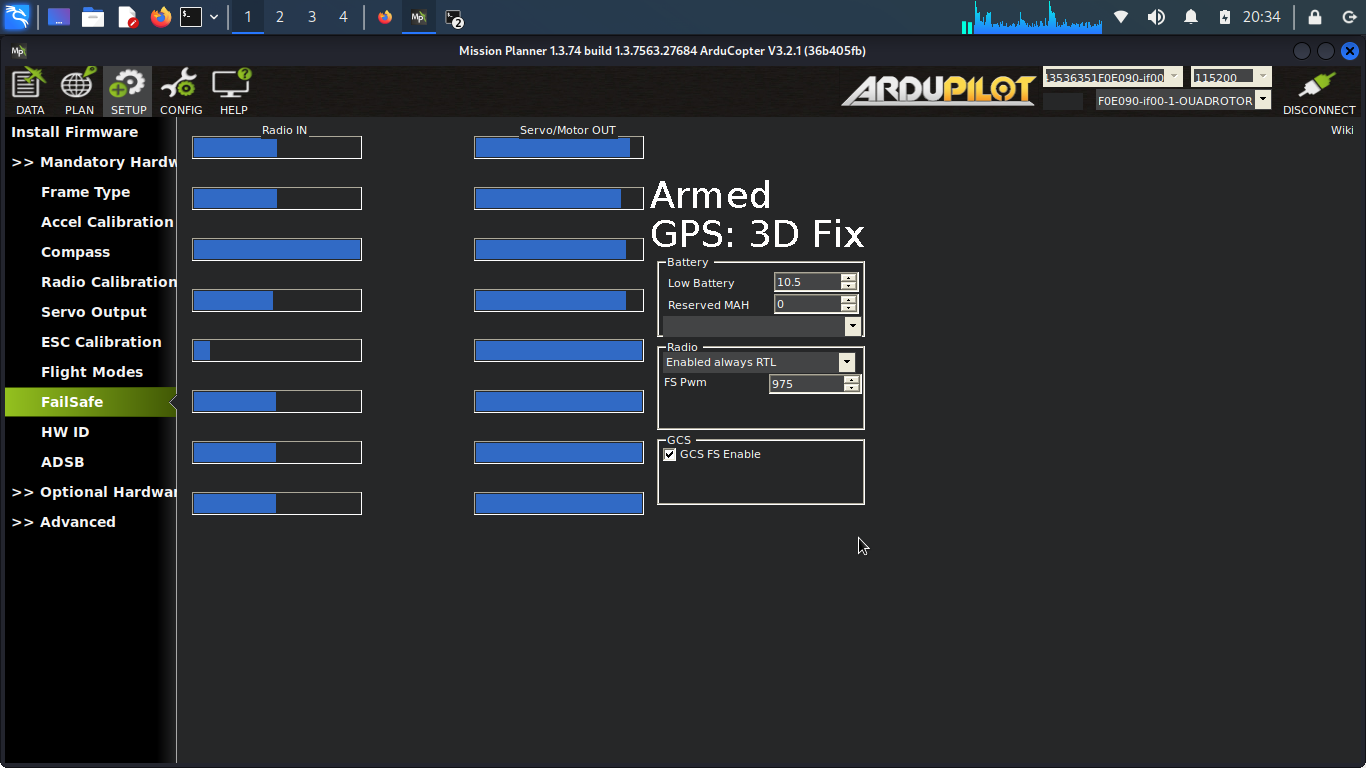
Actually I’m not only doing a hover test I’m also looking for sulotions for the motor 3 because my amp 2.8 flight controller only send a maximum 1247 pwm signal to the motor as shown on the picture unlike other motor reach 1900+ pwm signal wen I increase the throttle to the maximum. All the ESC are calibrated the only problem is the flight controller output for the motors.
Yes, I’m trying to help with that. As you’ve already been told, doing tests without props or with ropes on are invalid.
What was the result of the motor test?
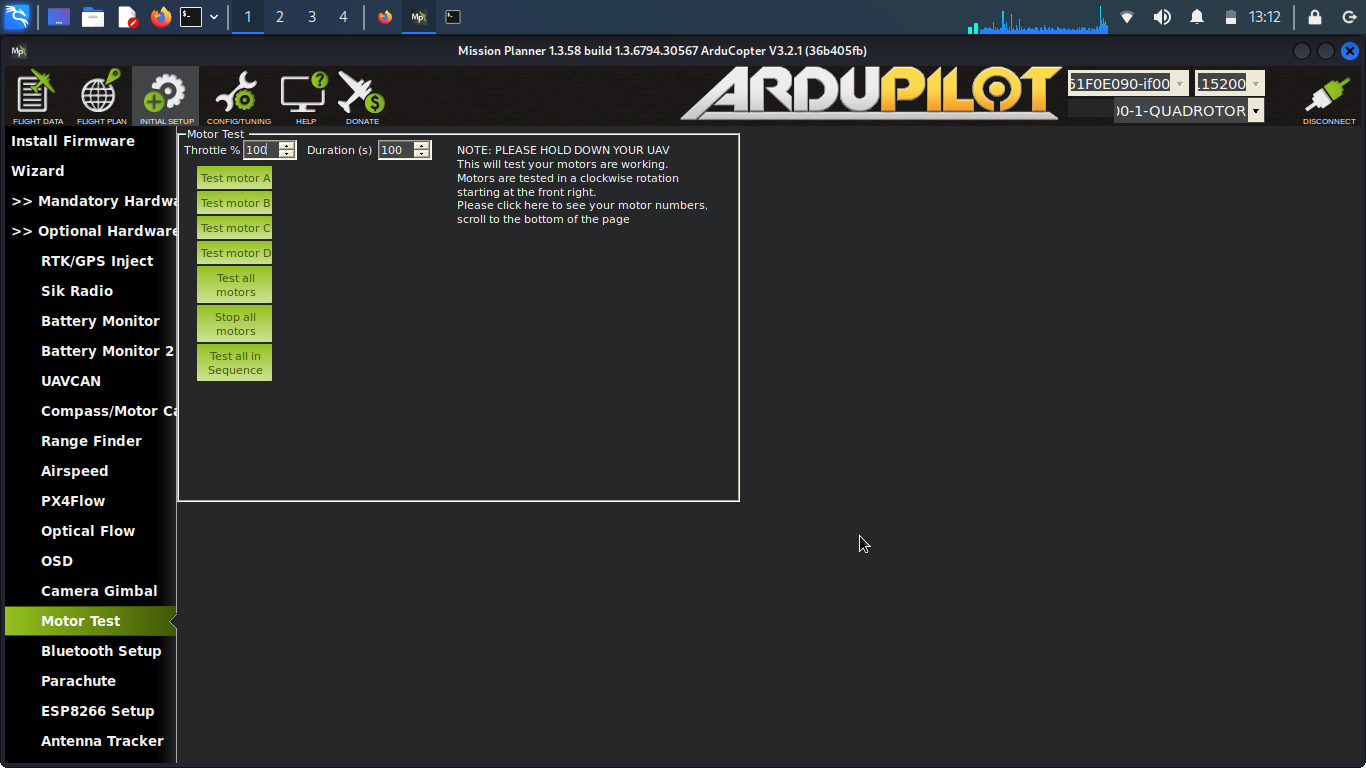
I put 100% Throttle on all motors for 100 sec and I got a 2001 PWM signal.

But if I try to ARM the drone and increase the Trottle to the max I got 1900+ PWM Signal to 1,2 and 4 but the motor no. 3 only 1200+ max it only increases when I tilt to the motor 3 side it increased to 1400+

Result by tilting to the motor 3 side (left of the drone)
not increasing like the motor 2
---- Following -----
I assume you did do a RC calibration ?
If you done the RC calibration already you can also check some parameters:
RC3_MAX
RC3_MIN
and compare those with any of the other 3 channels. I.e. RC1_MAX & RC1_MIN
This might give you an idea where the problem is.
RC1

RC2

RC3

RC4

That is the default settings of my full parameter list, still, the motor/servo no.3 does not reach 1900+ when I increase the Throttle to the maximum.
I’ve seen reports on here that some experienced such odd behaviour of their FC.
A fresh installation of arducopter fixed it. - I know it’s a bit painful going through all the setup again, but if it fixes the problem then surely worth it.
-Happened to me as well in the past.
Thank You ![]()
![]() Karl_Schoelpple
Karl_Schoelpple ![]() for your advice now my drone motors are synced in full Throttle and also Thanks to others for helping me with my problem
for your advice now my drone motors are synced in full Throttle and also Thanks to others for helping me with my problem ![]()
![]()
The solution to the problem (conclusion):
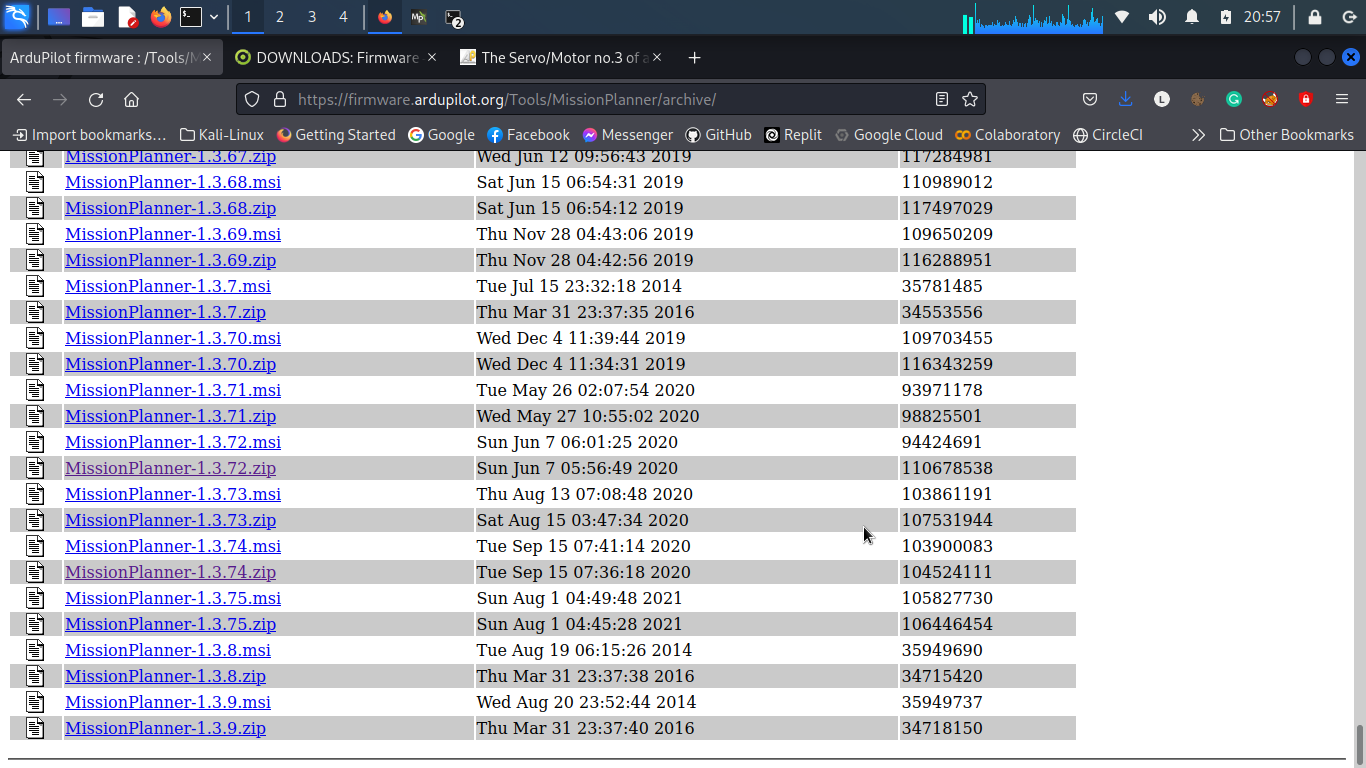
I try to install other versions of missionplanner and try to calibrate the accelerometer in that version and I did almost 2 times of calibrations of the accelerometer for every version I downloaded in ardupilot missionplanner version list for the result and I manage to get better results in missionplanner 1.3.74, I did also make a little adjustment in the full parameter list.
I am having same issue I guess I will have to do same you did I will go for 1.3.74 version but can you guide me through the adjustment you made in the full parameter list
Try to fix the Max and Min of every motor/esc sometimes after the calibration they are not all thesame. Example in Full parameter list RC1 Max 2000, Min 1000 upto RC4 if you using quadcopter RC1 to RC6 if you using hexacopter and so on.
After the Accelerometer and Compass Calibration edit this rc1, rc2, rc3, rc4 in your Full Parameter List.
RC1:
*DZ:30
*Max:2000
*Min:1000
*Trim:1500
RC2:
*DZ:30
*Max:2000
*Min:1000
*Trim:1500
RC3:
*DZ:30
*Max:2000
*Min:1000
*Trim:1500
RC4:
*DZ:30
*Max:2000
*Min:1000
*Trim:1500
Remove all your propellers and Tests. Go to fail safe, Armed, Increase your throttle and check motor 1,2,3,4 if they are increasing at the same time.
The RC parameters are for your transmitter channels - not the outputs (motors).
I don’t know why, but if I change the Max, Min, and Trim the output for motors are also changed so I try to set it all to 2000 Max, 1000 Min, and 1500 Trim after the calibration now I am able to fly my drone without any problem
If I don’t edit the RC max, min, and trim in the full parameter list after the accelerometer, compass, and radio calibration this will happen.

(The video is for demonstration only and I don’t own the video.)