Just wanted to show my own creation “SeaBritt”
I have worked on it for almost a year, and I am now very pleased with how it performs.
Intended to be a multi purpose platform for all kinds of water based inspections, surveying and even fish trolling.
It uses a Durandal controller and runs on dual 6S batteries all the way up to 24A total with 12 A LIION normally
It cruises well up to 15 kmh, most efficient around 8 kmh
Designed to cut through the waves rather than ride over, it handles rough water quite good. The bow uses the same principle as modern surfski race kayaks.
Redundancy has high priority with dual independent water rudders connected to steering, dual side thrusters connected to the throttle output. Dual batteries
The center motor can provide vectored thrust and reverse, this motor is controlled directly to a channel independent from the throttle output. (Vectoring via direct)
LIDAR range sensors front and back.
Dual analog FPV cams front and back, front at 180 degree servo
Crossfire.
Sure!
I will put in some more details and pictures by tomorrow.
The hull is fiberglass outer shell and can operate on both salt and fresh water in relative protetcted waters.
There is very little water spray to the upper decks (depending on the roughness of the water and speed)
Each ponton is 100 cm long and the boat weigh 6-8kg.
If the usage will primarily be salt water ouside protected aeras (offshore), I would scale the boat up around 50%, and modify the bow as a start.
See you soon
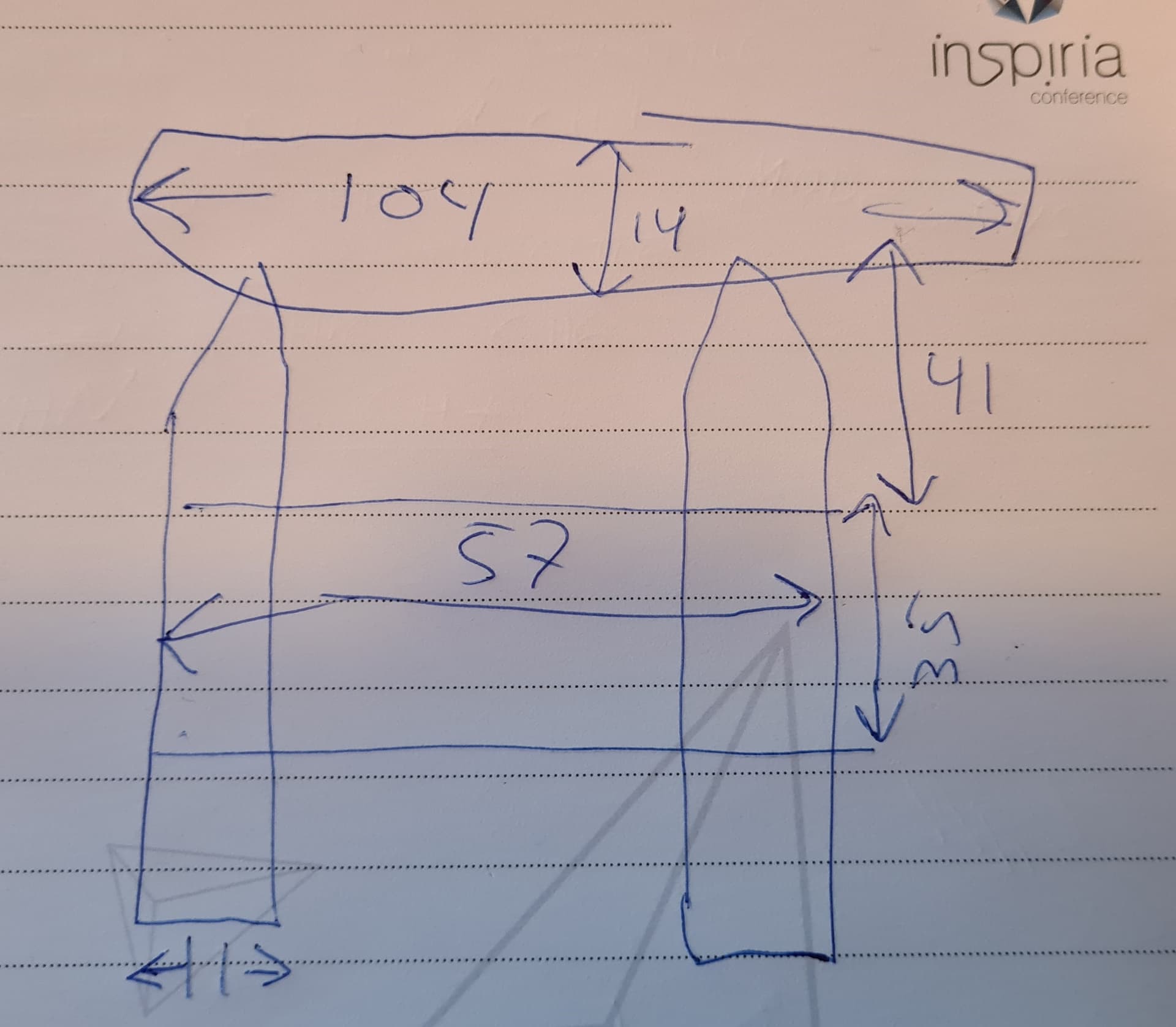
Here is a rather sloppy drawing of the dimensions
(In centimeters)
I tried to keep the size within reasonable limits for transport, yet big enough to work well in relatively rough water.
For salt water offshore use, I would upscale the boat say 50% and deepen the keel section (as I tried to depict on the drawing)
The working boat has a constant depth in the front of 14 cm.
The hull is plywood with 200g glass cover.
Center plate is XPS building foam hot wire cut with 200g glass cover, this makes it unsinkable
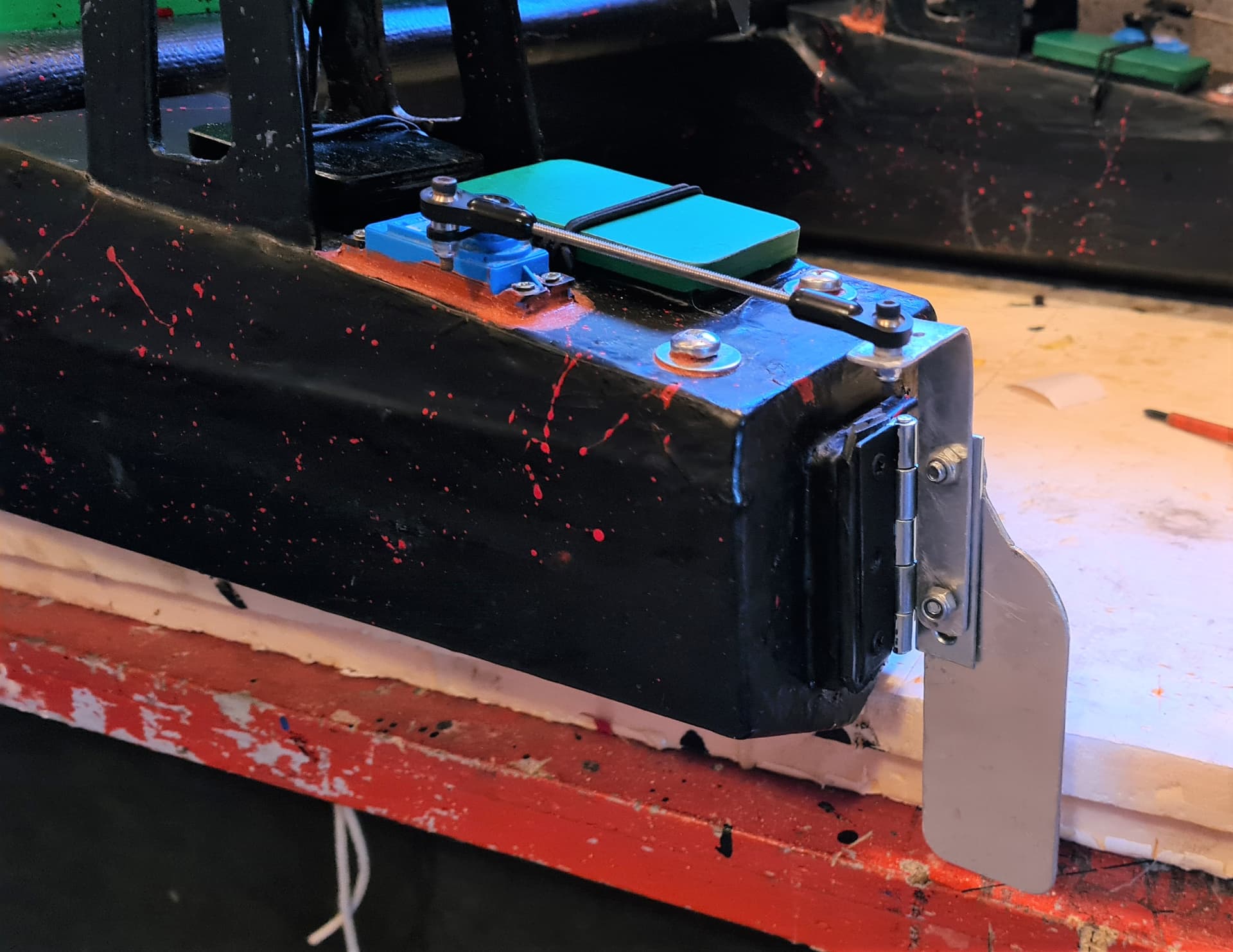
Rudders use waterproof servos, and rides on a common door hinge, can be folded up for transport
A note here; the outer finish can surely be improved on with proper skills and materials.
Also, the plywood base can be skipped for a direct mold, however, the reduced weight should then be compensated with ballast
2814 770 motors with 12x6 props, works great with 6S in this case
U5 center motor with 15x9
The side thrusters cruise at around 28% output, about 7 kmh
at 20%, roughly 5 kmh
Vectored thrust is not super efficient, but works.
The center motor is primary for redundancy and reverse.
Both speed control and vectoring on this is direct channel.
The top portion is plywood with raised barriers for some water sealant, however, there is normally little or no spray if the speed is kept reasonable in relation to water conditions
The ESC`s are located on the back with a large opening for cooling, one for each motor.
The batteries seen are 2x 6S/2 6A LIION, can run the boat for around one hour at 8 kmh
Can also take up to 2x 12A LIPO that will roughly double the run time.
reducing speed to 4 kmh will almost double run times
Dual inputs to the power module.
Separate becs for the servo rail (5V) and the lighting and FPV system (12v)
Note the first picture, where you see the spray barriers on the front, these are very important, and keep the bow wave that forms above 10 kmh in check