This is my first time tuning VOTL, and also the first time tuning Y3 configuration. I haven’t manually adjusted the PID before, I used autotune. This time I want to manually tune the PID to get a better understanding of the PID. In the follow-up, I try to put the parameters of each debugging into my flight video for better observation.
As shown in the current video,
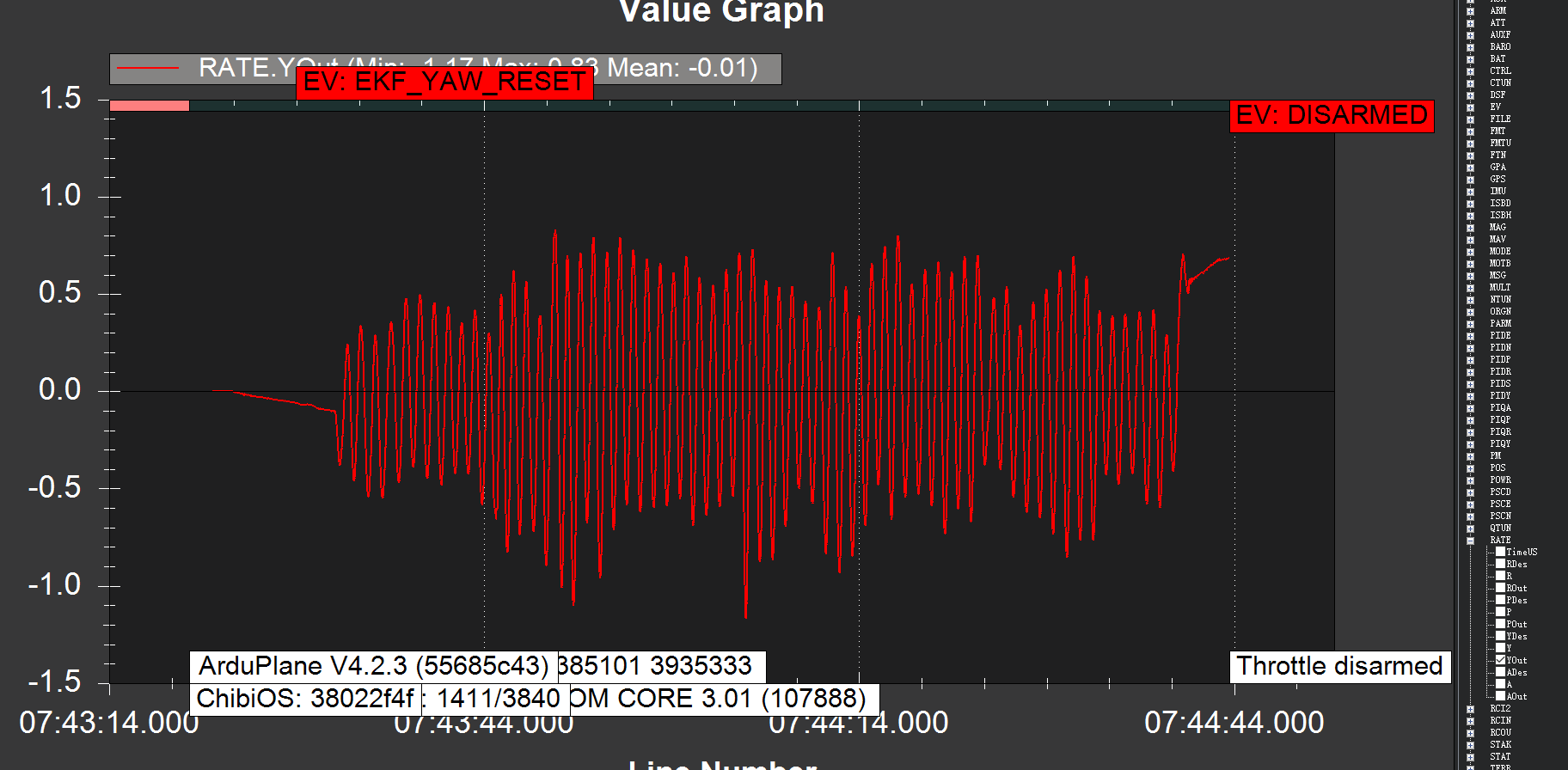
after my plane hovers, the YAW axis swings left and right. I have tried to increase or decrease P and D, but it is still unstable. I would like to ask, how to distinguish whether the P value and D value should be large or small, and can it be seen from the frequency of the swing?
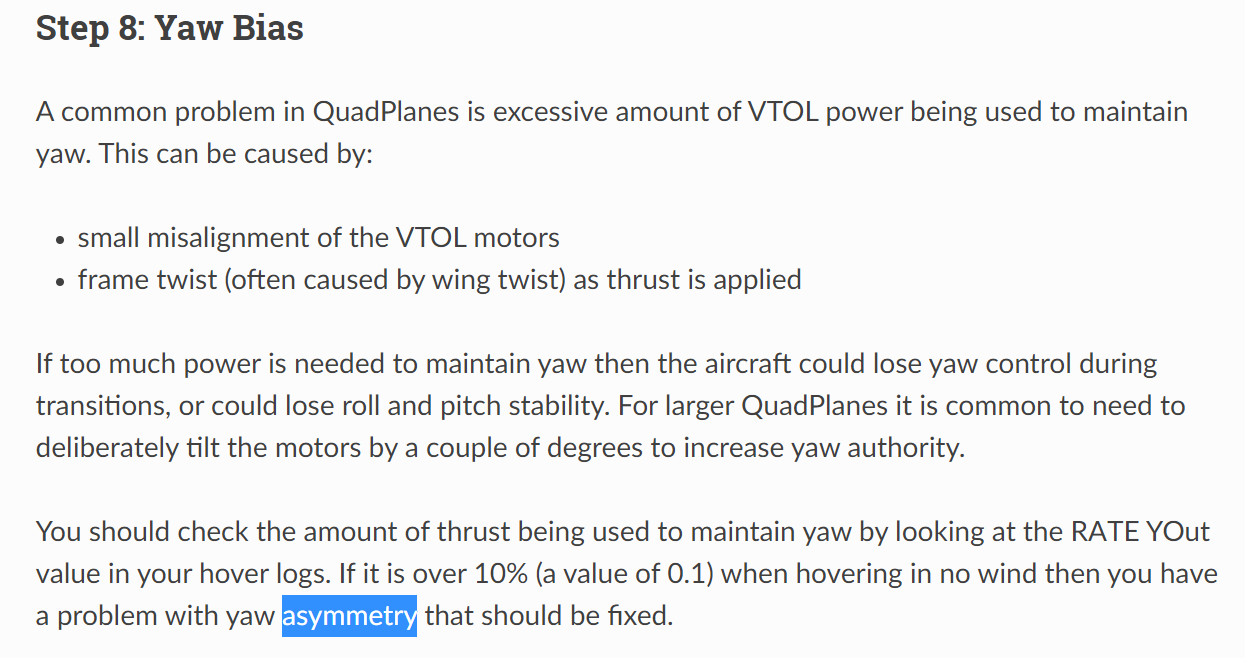
By looking at the relevant documents, I think the problem is that the first two motors are not symmetrical, and now the problem is how to adjust it symmetrically. Because the front two motors can be tilted, I don’t know which side of the motor angle needs to be adjusted. Because of the Y3 configuration, when flying, the front two motors have to be tilted up and down to control the direction, which is difficult to strictly maintain. 90°.
Today I used the script to automatically tune the plane. The effects of ROLL and PITCH are good. You can watch my video, but the YAW is still swinging back and forth. Now the yaw control is very slow. Maybe this is the only way to do it in the end. I have to accept the current result.
Hi I have the same issue with my Freeman 2300 VTOL. Which has 2 front motors tilting quadrotor. Wonder if you figured out the problem. Maybe should we change the ardupilot version. I am using arduplane. 4.3.3 right now.