Hi Guys.
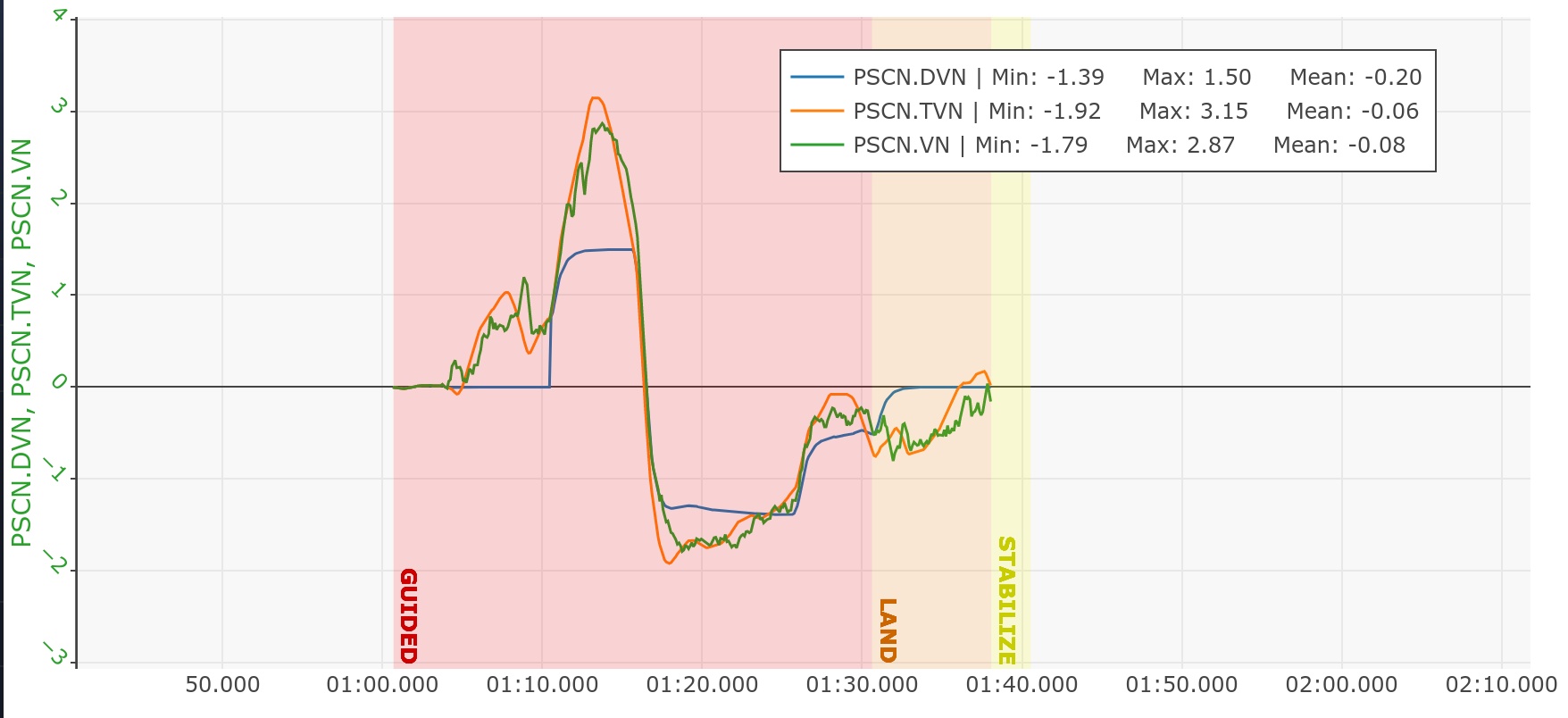
I am doing a simple flight task in guided mode that I sent constant velocity commands to the ArduCopter using SET_POSITION_TARGET_LOCAL_NED via pymavlink. The quadrotor did maneuver in correct directions but from the log I found that it tracked the target velocity instead of my desired velocity. The log is shown below
My question is where the target velocity comes from? I assume that the position controller did not get involved in the flight. How can I make the quadrotor track exactly the velocity I set.