airloader.param (22.8 KB)
This the first time to set up quadplane,but I have make many plane with arduplane firmware.
the quad plane can’t spin when I set to qstablized and manual flight mode.the Fc has been armed,also the quadplane’s tilt servo can’t move when in qstablized.
I don’t know how to describe this issue,so i make a video,please checked the videos for detail
I have find a lot of documentaion to lean,but can’t fix this problem,Hope some one can give a help many thinks.
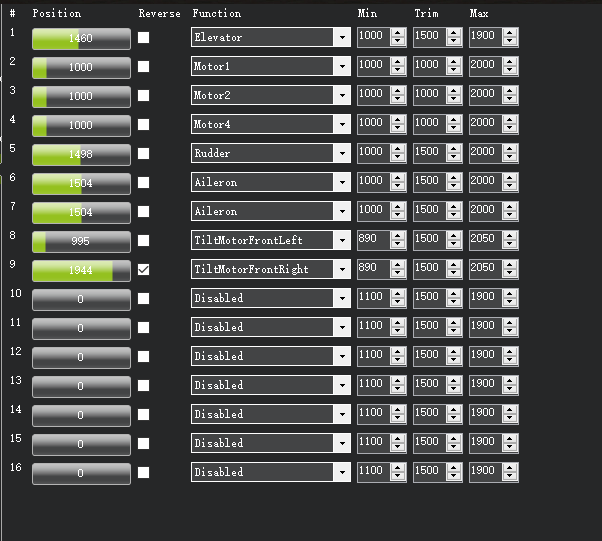
the prameters has been upload,
BTW this is an issue I had in Realflght and on my bench I came here to see if anyone had the same issue . Hopefully its a simple arming issue or a USB port issue. It did go away as long as i don’t arm with the sticks before the switch button. In Realflight I had to reboot the computer. also check Q_M_PWM_MIN and Q_M_PWM_MAX
I may have find out what the problem.First set q_parameters to the correct value then go to servo out page to define the correct servo out.if you set the servo out in mission planner first,then change q_parameters,it may have some issues
New issue is coming,I force the FC armed by setting the arm check=0 and armed require=0,in manual mode the motor can’t spin when push throttle stick in the radio。the vector yaw doesn’t have any output in qstablized mode when turn rudder stick